
Pwm контроллер что это
ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в сварочных аппаратах, в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода — полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.
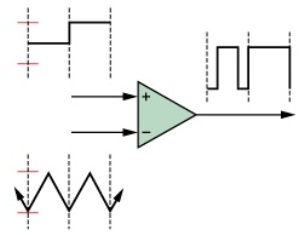
В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий — модулирующий непрерывный сигнал.
Выходные импульсы получаются прямоугольными, частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала — на выходе будет отрицательная часть импульса.
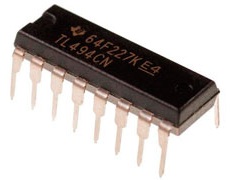
Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал — на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное — когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ — микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.
Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации — это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.
Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
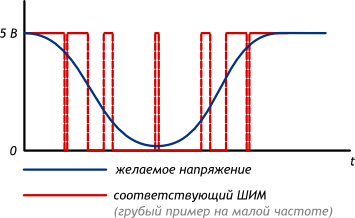
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, преобразователями частоты для двигателей и т. д.
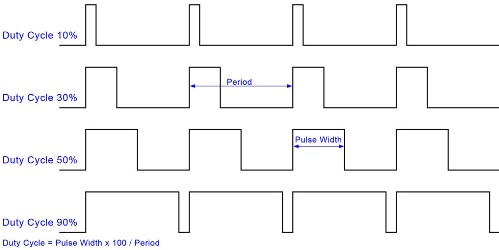
Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.
| Широтно-Импульсная Модуляция (Pulse-Width Modulation) |
| Уже в первых экспериментах с коллекторным моторчиком и батарейкой можно было заметить, что при частом попеременном включении и выключении электромотора частота вращения его ротора изменяется. То есть происходила регулировка скорости вращения путём периодичного включения и отключения тока через моторчик. Если изменять при этом время в подключённом состоянии и длину паузы между подключениями, можно регулировать скорость вращения мотора. Такой же эффект проявляется практически с любым потребителем электрического тока, имеющим определённую инерцию, т.е. способным запасать энергию. |
| Из бесед Бибота и Бобота |
Хорошо, что ты попросил, дружище Бибот. Так как именно импульсы являются главными носителями информации в цифровой электронике, поэтому очень важно знать разные характеристики импульсов. Начнём, пожалуй, с одиночного импульса.
Электрический импульс — это всплеск напряжения или тока в определённом и конечном промежутке времени.
Импульс всегда имеет начало (передний фронт) и конец (спад).
Ты уже наверняка знаешь, что в цифровой электронике все сигналы могут быть представлены всего двумя уровнями напряжения: "логической единицей" и "логическим нулём". Это всего лишь условные величины напряжения. "Логической единице" приписывается высокий уровень напряжения, обычно около 2-3 вольт, "логическим нулём" считается близкое к нулю напряжение. Цифровые импульсы графически изображаются прямоугольными или трапециевидными по форме:

Главной величиной одиночного импульса является его длина. Длина импульса — это отрезок времени, в течение которого рассматриваемый логический уровень имеет одно устойчивое состояние. На рисунке латинской буквой t отмечена длина импульса высокого уровня, то есть логической "1". Длина импульса измеряется в секундах, но чаще в миллисекундах (мс), микросекундах (мкс) и даже наносекундах (нс). Одна наносекунда — это очень короткий отрезок времени!
Запомни: 1 мс = 0,001 сек.
1 мкс = 0,000001 сек
1 нс = 0,000000001 сек
Применяются также англоязычные сокращения: ms — миллисекунда, μs — микросекунда, ns — наносекунда.
За одну наносекунду я даже пикнуть не успею!
Скажи, Бобот, а что произойдёт, если импульсов будет много?
Хороший вопрос, Бибот! Чем больше импульсов, тем больше информации можно ими передать. У множества импульсов появляется много характеристик. Самая простая — частота следования импульсов.
Частота следования импульсов — это количество полных импульсов в единицу времени. За единицу времени принято брать одну секунду. Единицей измерения частоты является герц, по имени немецкого физика Генриха Герца. Один герц — это регистрация одного полного импульса за одну секунду. Если произойдёт тысяча колебаний в секунду будет 1000 герц, или сокращённо 1000 Гц, что равно , . Можно встретить и англоязычное сокращение: Hz — Гц. Частота обозначается буквой F .
Существуют ещё несколько характеристик, которые проявляются только при участии двух и более импульсов. Одним из таких важных параметров импульсной последовательности является период.
Период импульсов — это промежуток времени, между двумя характерными точками двух соседних импульсов. Обычно период измеряют между двух фронтов или двух спадов соседних импульсов и обозначают заглавной латинской буквой T .

Период следования импульсов напрямую связан с частотой импульсной последовательности, и его можно вычислить по формуле: T=1/F
Если длина импульса t точно равна половине периода T , то такой сигнал часто называют " меандр ".
Скважностью импульсов называется отношение периода следования импульсов к их длительности и обозначается буквой S: S=T/t Скважность — безразмерная величина и не имеет единиц измерения, но может быть выражена в процентах. Часто в англоязычных текстах встречается термин Duty cycle, это так называемый коэффициент заполнения.
Коэффициент заполнения D является величиной, обратной скважности. Коэффициент заполнения обычно выражается в процентах и вычисляется по формуле: D=1/S
Дорогой Бобот, так много разного и интересного у простых импульсов! Но потихоньку я уже начинаю путаться.
Дружище, Бибот, это ты верно заметил, импульсы — не так уж и просты! Но осталось совсем чуть-чуть.
 Если ты меня внимательно слушал, то ты мог заметить, что если увеличивать или уменьшать длину импульса и при этом на столько же уменьшать или увеличивать паузу между импульсами, то период следования импульсов и частота останется неизменной! Это очень важный факт, который нам ещё не раз понадобится в будущем.
Если ты меня внимательно слушал, то ты мог заметить, что если увеличивать или уменьшать длину импульса и при этом на столько же уменьшать или увеличивать паузу между импульсами, то период следования импульсов и частота останется неизменной! Это очень важный факт, который нам ещё не раз понадобится в будущем.
Но сейчас ещё хочется добавить другие способы передачи информации с помощью импульсов.
Например, можно несколько импульсов объединить в группы. Такие группы с паузами определённой длины между ними называют пачками или пакетами. Генерируя разное число импульсов в группе и варьируя его, можно также передавать какую-либо информацию.

Для передачи информации в цифровой электронике (ещё её называют дискретной электроникой) можно использовать два и более проводников или каналов с разными импульсными сигналами. При этом информация передаётся с учётом определённых правил. Такой метод позволяет заметно увеличить скорость передачи информации или добавляет возможность управлением потоком информации между различными схемами.
Перечисленные возможности передачи информации с помощью импульсов могут быть использованы как сами по себе раздельно, так и в комбинации между собой.
Существуют также множество стандартов передачи информации с помощью импульсов, например I2C, SPI, CAN, USB, LPT.
Именно этот эффект положен в основу принципа Широтно-Импульсной Модуляции (ШИМ) , также встречается английское сокращение — PWM (Pulse-Width Modulation) .
Широтно-Импульсная Модуляция — это способ кодирования аналогового сигналa путём изменения ширины (длительности) прямоугольных импульсов несущей частоты.
На Рис. 1 синим цветом представлены типичные графики ШИМ сигнала. Так как при ШИМ частота импульсов, а значит, и период (T), остаются неизменными, то при уменьшении ширины импульса (t) увеличивается пауза между импульсами (эпюра "Б" на Рис. 1.) и наоборот: при расширении импульса пауза сужается (эпюра "В" на Рис. 1.).

Если сигнал ШИМ пропустить через фильтр низших частот, то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Назначение фильтра — не пропускать несущую частоту ШИМ. Сам фильтр может состоять из простейшей интегрирующей RC цепи, или же может отсутствовать вовсе, например, если оконечная нагрузка имеет достаточную инерцию.
Таким образом, имея в расположении лишь два логических уровня, "единицу" и "ноль", можно получить любое промежуточное значение аналогового сигнала.
Часто в схемах с ШИМ применяют обратную связь для управления длительностью импульса по той или иной закономерности, например, в схемах PID-регуляторов.
Простейшую схему ШИМ-управления можно собрать всего на нескольких транзисторах. Схема (Рис.2) представляет собой одну из разновидностей генераторов импульсов — мультивибратор. Во время задающей цепи баз обоих транзисторов включён переменный резистор R6. Вращая его движок, можно в некоторых пределах регулировать скважность выходных импульсов.

Данная схема способна работать в широких пределах питающего напряжения от 5 до 15 вольт, можно использовать любые широко распространенные транзисторы и любой выпрямительный диод, номиналы сопротивлений могут отличаться на 10%. В качестве нагрузки можно использовать любой мотор, насчитанный на то напряжение питания, которым питается вся схема. Можно также подключить лампу накаливания и наблюдать изменение её яркости свечения, если подключить малогабаритный "динамик", то при вращении движка потенциометра можно услышать изменение характера звука.
Схемы простейших широтно-импульсных модуляторов можно построить и на логических элементах, и на микросхеме универсального таймера NE555 (отечественный аналог — КР1006ВИ1), и на операционном усилителе. Существуют и специально разработанные ШИМ-контроллеры.
В большинстве этих схем для изменения ширины выходного импульса так или иначе используется аналоговое напряжение. В цифровой же электронике для прямых операций с аналоговыми сигналами необходимо усложнять схему. Поэтому схемы ШИМ-управления в цифровой технике строят на принципе отсчёта определённого числа импульсов задающего генератора. Так, задавая количество отсчитываемых импульсов, можно точно отмерять длительность выходного импульса и паузы между импульсами.
Один из вариантов схемы с цифровой установкой ширины выходного импульса приведен на Рис. 3. Схема собрана на распространённых цифровых микросхемах серии К155 (зарубежный аналог — серия 74). В качестве коммутирующего элемента P1 для эксперимента можно применить переключатель на 16 положений или просто подсоединять вход сброса RS-триггера к нужному выходу дешифратора. В реальной же схеме можно применить микросхему селектор К155КП1 с соответствующей схемой цифрового управления.

В этой схеме применен четырёхразрядный двоичный счётчик К155ИЕ5. Максимальное число, которое можно представить, имея четыре разряда — 16. Поэтому в этой схеме частота выходных импульсов ШИМ будет в 16 раз ниже частоты счёта счётчика. И таким же будет количество градаций регулировки ширины импульсов. При разработке цифровых устройств с ШИМ следует помнить, что чем больше разрядность ШИМ, тем больше градаций импульса можно получить и тем выше частота работы счётчика.
Практически во всех современных микроконтроллерах имеются встроенные средства формирования одного или более независимых каналов ШИМ. Очень гибкие возможности конфигурации ШИМ-формирователя микроконтроллера позволяют использовать их в разнообразных схемах электронного управления и автоматики.
Пожалуй, наиболее часто ШИМ применяется для управления различными типами моторов. Тут основным достоинством ШИМ-управления является то, что электронный ключ (обычно транзистор) работает в ключевом режиме, что заметно повышает экономичность схемы, так как потери на активных элементах сводятся к минимуму.
Кроме того, широтно-импульсная модуляция применяется для формирования аналоговых сигналов сложной формы, в импульсных стабилизаторах, для кодирования и помехозащищённой передачи аналоговой информации.
Раньше для питания устройств использовали схему с понижающим (или повышающим, или многообмоточным) трансформатором, диодным мостом, фильтром для сглаживания пульсаций. Для стабилизации использовались линейные схемы на параметрических или интегральных стабилизаторах. Главным недостатком был низкий КПД и большой вес и габариты мощных блоков питания.
Во всех современных бытовых электроприборах используются импульсные блоки питания (ИБП, ИИП – одно и то же). В большинстве таких блоков питания в качестве основного управляющего элемента используют ШИМ-контроллер. В этой статье мы рассмотрим его устройство и назначение.
Определение и основные преимущества
ШИМ-контроллер – это устройство, которое содержит в себе ряд схемотехнических решений для управления силовыми ключами. При этом управление происходит на основании информации полученной по цепям обратной связи по току или напряжению – это нужно для стабилизации выходных параметров.
Иногда, ШИМ-контроллерами называются генераторы ШИМ-импульсов, но в них нет возможности подключить цепи обратной связи, и они подходят скорее для регуляторов напряжения, чем для обеспечения стабильного питания приборов. Однако в литературе и интернет-порталах часто можно встретить названия типа «ШИМ-контроллер, на NE555» или «… на ардуино» — это не совсем верно по вышеуказанным причинам, они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Аббревиатура «ШИМ» расшифровывается, как широтно-импульсная модуляция – это один из методов модуляции сигнала не за счёт величины выходного напряжения, а именно за счёт изменения ширины импульсов. В результате формируется моделируемый сигнал за счёт интегрирования импульсов с помощью C- или LC-цепей, другими словами – за счёт сглаживания.
Вывод: ШИМ-контроллер – устройство, которое управляет ШИМ-сигналом.
Основные характеристики
Для ШИМ-сигнала можно выделить две основных характеристики:
1. Частота импульсов – от этого зависит рабочая частота преобразователя. Типовыми являются частоты выше 20 кГц, фактически 40-100 кГц.
2. Коэффициент заполнения и скважность. Это две смежных величины характеризующие одно и то же. Коэффициент заполнения может обозначаться буквой S, а скважность D.
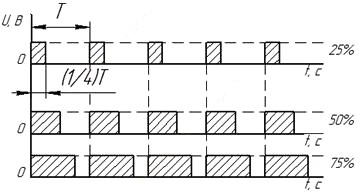
где T – это период сигнала,
Коэффициент заполнения – часть времени от периода, когда на выходе контроллера формируется управляющий сигнал, всегда меньше 1. Скважность всегда больше 1. При частоте 100 кГц период сигнала равен 10 мкс, а ключ открыт в течении 2.5 мкс, то коэффициент заполнения – 0.25, в процентах – 25%, а скважность равна 4.
Также важно учитывать внутреннюю конструкцию и предназначение по количеству управляемых ключей.
Отличия от линейных схем потери
Как уже было сказано, преимуществом перед линейными схемами у импульсных источников питания является высокий КПД (больше 80, а в настоящее время и 90%). Это обусловлено следующим:
Допустим сглаженное напряжение после диодного моста равно 15В, ток нагрузки 1А. Вам нужно получить стабилизированное питание напряжением 12В. Фактически линейный стабилизатор представляет собой сопротивление, которое изменяет свою величину в зависимости от величины входного напряжения для получения номинального выходного – с небольшими отклонениями (доли вольт) при изменениях входного (единицы и десятки вольт).
На резисторах, как известно, при протекании через них электрического тока выделяется тепловая энергия. На линейных стабилизаторах происходит такой же процесс. Выделенная мощность будет равна:
Так как в рассмотренном примере ток нагрузки 1А, входное напряжение 15В, а выходное – 12В, то рассчитаем потери и КПД линейного стабилизатора (КРЕНка или типа L7812):
Pпотерь=(15В-12В)*1А = 3В*1А = 3Вт
Тогда КПД равен:
Если же входное напряжение вырастит до 20В, например, то КПД снизится:
Основной особенностью ШИМ является то, что силовой элемент, пусть это будет MOSFET, либо открыт полностью, либо полностью закрыт и ток через него не протекает. Поэтому потери КПД обусловлены только потерями проводимости
И потерями переключения. Это тема для отдельной статьи, поэтому не будем останавливаться на этом вопросе. Также потери блока питания возникают в выпрямительных диодах (входных и выходных, если блок питания сетевой), а также на проводниках, пассивных элементах фильтра и прочем.
Общая структура
Рассмотрим общую структуру абстрактного ШИМ-контроллер. Я употребил слово "абстрактного" потому что, в общем, все они похожи, но их функционал все же может отличаться в определенных пределах, соответственно будет отличаться структура и выводы.
Внутри ШИМ-контроллера, как и в любой другой ИМС находится полупроводниковый кристалл, на котором расположена сложная схема. В состав контроллера входят следующие функциональные узлы:
1. Генератор импульсов.
2. Источник опорного напряжения. (ИОН)
3. Цепи для обработки сигнала обратной связи (ОС): усилитель ошибки, компаратор.
4. Генератор импульсов управляет встроенными транзисторами, которые предназначены для управления силовым ключом или ключами.
Количество силовых ключей, которыми может управлять ШИМ-контроллер, зависит от его предназначения. Простейшие обратноходовые преобразователи в своей схеме содержат 1 силовой ключ, полумостовые схемы (push-pull) — 2 ключа, мостовые — 4.
От типа ключа также зависит выбор ШИМ-контроллера. Для управления биполярным транзистором основным требованием является, чтобы выходной ток управления ШИМ-контроллера не был ниже, чем ток транзистора деленный на H21э, чтобы его включать и отключать достаточно просто подавать импульсы на базу. В этом случае подойдет большинство контроллеров.
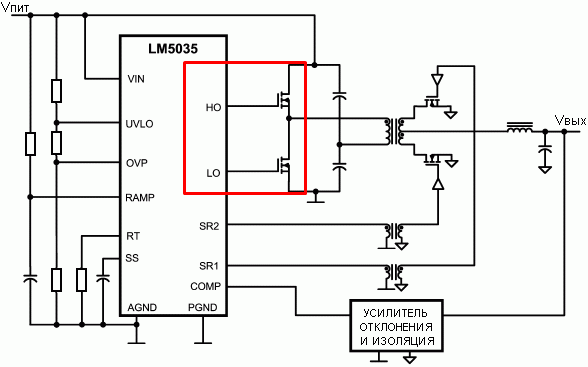
В случае управления ключами с изолированным затвором (MOSFET, IGBT) есть определенные нюансы. Для быстрого отключения нужно разрядить емкость затвора. Для этого выходную цепь затвора выполняют из двух ключей — один из них соединен с источником питания с выводом ИМС и управляет затвором (включает транзистор), а второй установлен между выходом и землей, когда нужно отключить силовой транзистор — первый ключ закрывается, второй открывается, замыкая затвор на землю и разряжает его.
В некоторых ШИМ-контроллрах для маломощных блоков питания (до 50 Вт) силовые ключи встроенные и внешние не используются. Пример — 5l0830R
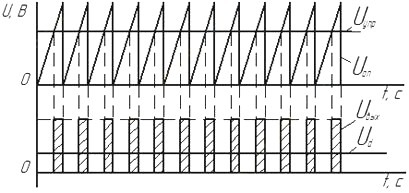
Если говорить обобщенно, то ШИМ-контроллер можно представить в виде компаратора, на один вход которого подан сигнал с цепи обратной связи (ОС), а на второй вход пилообразный изменяющийся сигнал. Когда пилообразный сигнал достигает и превышает по величине сигнал ОС, то на выходе компаратора возникает импульс.
При изменениях сигналов на входах ширина импульсов меняется. Допустим, что вы подключили мощный потребитель к блоку питания, и на его выходе напряжение просело, тогда напряжение ОС также упадет. Тогда в большей части периода будет наблюдаться превышение пилообразного сигнала над сигналом ОС, и ширина импульсов увеличится. Всё вышесказанное в определенной мере отражено на графиках.
Рабочая частота генератора устанавливается с помощью частотозадающей RC-цепи.
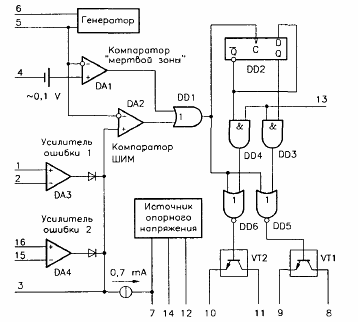
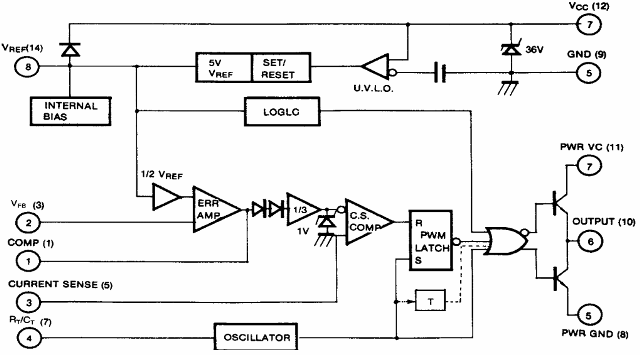
Функциональная схема ШИМ-контроллера на примере TL494, мы рассмотрим его позже подробнее. Назначение выводов и отдельных узлов описано в следующем подзаголовке.
Назначение выводов
ШИМ-контроллеры выпускаются в различных корпусах. Выводов у них может быть от трех до 16 и более. Соответственно от количества выводов, а вернее их назначения зависит гибкость использования контроллера. Например, в популярной микросхеме UC3843 — чаще всего 8 выводов, а в еще более культовой — TL494 — 16 или 24.
Поэтому рассмотрим типовые названия выводов и их назначение:
GND – общий вывод соединяется с минусом схемы или с землей.
Uc (Vc) – питание микросхемы.
Ucc (Vss, Vcc) – Вывод для контроля питания. Если питание проседает, то возникает вероятность того, что силовые ключи не будут полностью открываться, а из-за этого начнут греться и сгорят. Вывод нужен чтобы отключить контроллер в подобной ситуации.
OUT – как видно из название — это выход контроллера. Здесь выводятся управляющий ШИМ-сигнал для силовых ключей. Выше мы упомянули, что в преобразователях разных топологий имеют разное количество ключей. Название вывода может отличаться в зависимости от этого. Например, в контроллерах для полумостовых схем он может называться HO и LO для верхнего и нижнего ключа соответственно. При этом и выход может быть однотактный и двухтактный (с одним ключем и двумя) — для управления полевыми транзисторами (пояснение см. выше). Но и сам контроллер может быть для однотактной и двухтактной схемы — с одним и двумя выходными выводами соответственно. Это важно.
Vref – опорное напряжения, обычно соединяется с землей через небольшой конденсатор (единицы микрофарад).
ILIM – сигнал с датчика тока. Нужен для ограничения выходного тока. Соединяется с цепями обратной связи.
ILIMREF – на ней устанавливается напряжение срабатывания ножки ILIM
SS – формируется сигнал для мягкого старта контроллера. Предназначен для плавного выхода на номинальный режим. Между ней и общим проводом для обеспечения плавного пуска устанавливают конденсатор.
RtCt – выводы для подключения времязадающей RC-цепи, которая определяет частоту ШИМ-сигнала.
CLOCK – тактовые импульсы для синхронизации нескольких ШИМ-контроллеров между собой тогда RC-цепь подключается только к ведущему контроллеру, а RT ведомых с Vref, CT ведомых соединяюся с общим.
RAMP – это ввод сравнения. На него подают пилообразное напряжение, например с вывода Ct, Когда оно превышает значение напряжение на выходе усиления ошибки, то на OUT появляется отключающий импульс — основа для ШИМ-регулирования.
INV и NONINV – это инвертирующий и неинвертирующий входы компаратора, на котором построен усилитель ошибки. Простыми словами: чем больше напряжении на INV — тем длинее выходные импульсы и наоборот. К нему подключается сигнал с делителя напряжения в цепи обратной связи с выхода. Тогда неинвертирующий вход NONINV подключают к общему проводу — GND.
EAOUT или Error Amplifier Output рус. Выход усилителя ошибки. Не смотря на то, что есть входы усилителя ошибки и с их помощью, в принципе можно регулировать выходные параметры, но контроллер довольно медленно на это реагирует. В результате медленной реакции может возникнуть возбуждение схемы, и она выйдет из строя. Поэтому с этого вывода через частотозависимые цепи подают сигналы на INV. Это еще называется частотной коррекцией усилителя ошибки.
Примеры реальных устройств
Для закрепления информации давайте рассмотрим несколько примеров типовых ШИМ-контроллеров и их схем включения. Мы будем делать это на примере двух микросхем:
TL494 (её аналоги: KA7500B, КР1114ЕУ4, Sharp IR3M02, UA494, Fujitsu MB3759);
Они активно используются в блоках питания для компьютеров. Кстати, эти блоки питания обладают немалой мощностью (100 Вт и больше по 12В шине). Часто используются в качестве донора для переделки под лабораторный блок питания или универсальное мощное зарядное устройство, например для автомобильных аккумуляторов.
TL494 – обзор
Начнем с 494-й микросхемы. Её технические характеристики:
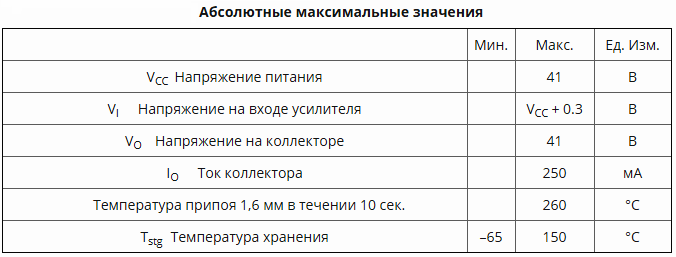
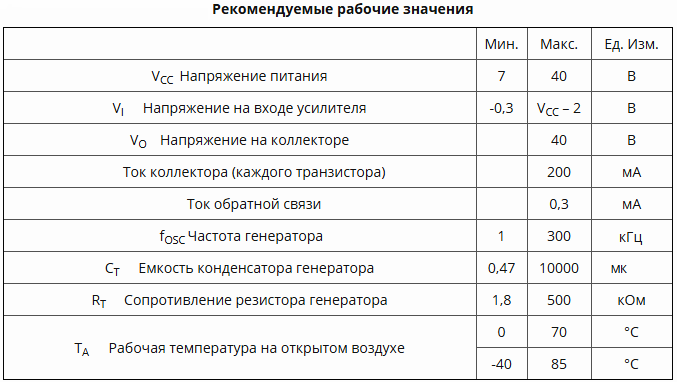
В этом конкретном примере можно видеть большинство описанных выше выводов:
1. Неинвертирующий вход первого компаратора ошибки
2. Инвертирующий вход первого компаратора ошибки
3. Вход обратной связи
4. Вход регулировки мертвого времени
5. Вывод для подключения внешнего времязадающего конденсатора
6. Вывод для подключения времязадающего резистора
7. Общий вывод микросхемы, минус питания
8. Вывод коллектора первого выходного транзистора
9. Вывод эмиттера первого выходного транзистора
10. Вывод эмиттера второго выходного транзистора
11. Вывод коллектора второго выходного транзистора
12. Вход подачи питающего напряжения
13. Вход выбора однотактного или же двухтактного режима работы микросхемы
14. Вывод встроенного источника опорного напряжения 5 вольт
15. Инвертирующий вход второго компаратора ошибки
16. Неинвертирующий вход второго компаратора ошибки
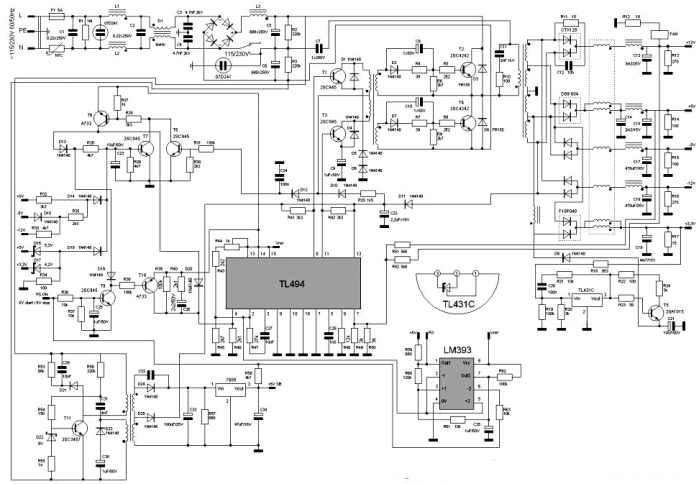
На рисунке ниже изображен пример компьютерного блока питания на этой микросхеме.
UC3843 — обзор
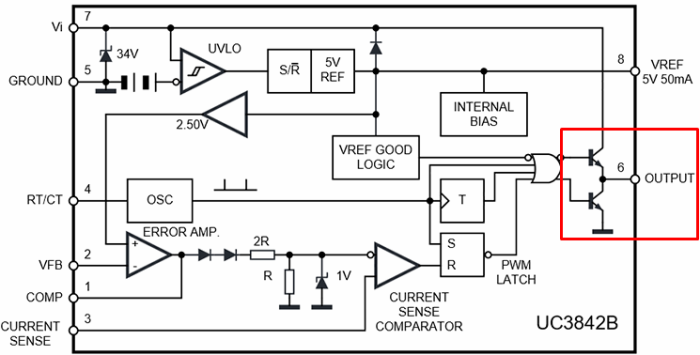
Другой популярной ШИМ является микросхема 3843 – на ней также строятся компьютерные и не только блоки питания. Её цоколевка расположена ниже, как вы можете наблюдать, у неё всего 8 выводов, но функции она выполняет те же, что и предыдущая ИМС.
Бывает UC3843 и в 14-ногом корпусе, но встречаются гораздо реже. Обратите внимание на маркировку – дополнительные выводы либо дублируются, либо незадействованы (NC).
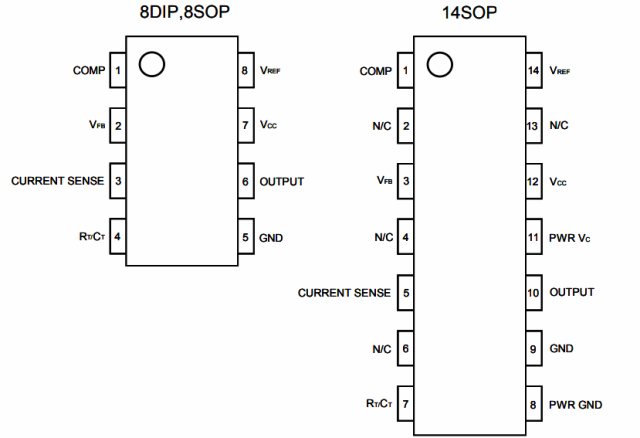
Расшифруем назначением выводов:
1. Вход компаратора (усилителя ошибки).
2. Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
3. Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
4. Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
6. Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
7. Напряжение питания микросхемы.
8. Выход источника опорного напряжения (5В, 50 мА).
Её внутренняя структура.
Можно убедится, что во многом похожа и на другие ШИМ-контроллеры.
Простая схема сетевого источника питания на UC3842
ШИМ со встроенным силовым ключем
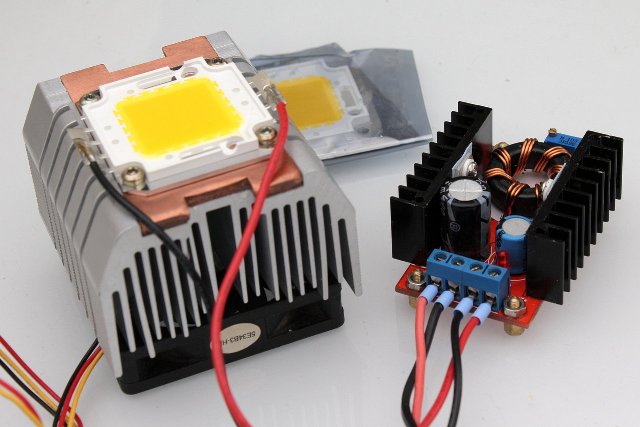
ШИМ-контроллеры со встроенным силовым ключем используются как в трансформаторных импульсных блоках питания, так и в бестрансформаторных DC-DC преобразователях понижающего (Buck), повышающего (Boost) и понижающее-повышающего (Buck-Boost) типов.
Пожалуй, одним из наиболее удачных примеров будет распространенная микросхема LM2596, на базе которого на рынке можно найти массу таких преобразователей, как изображен ниже.
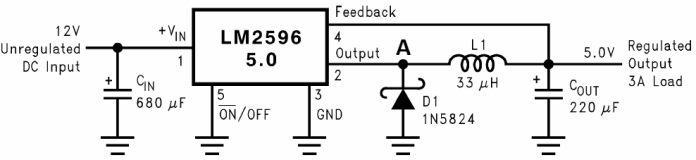
Такая микросхема содержит в себе все вышеописанные технические решения, а также вместо выходного каскада на маломощных ключах в ней встроен силовой ключ, способный выдержать ток до 3А. Ниже изображена внутренняя структура такого преобразователя.
Можно убедиться, что в сущности особых отличий от рассмотренных в ней нет.
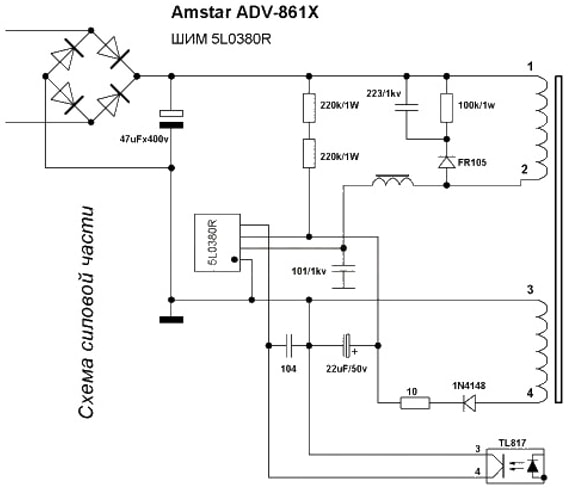
А вот пример трансформаторного блока питания для светодиодной ленты на подобном контроллере, как видите силового ключа нет, а только микросхема 5L0380R с четырьмя выводами. Отсюда следует, что в определенных задачах сложная схемотехника и гибкость TL494 просто не нужна. Это справедливо для маломощных блоков питания, где нет особых требований к шумам и помехам, а выходные пульсации можно погасить LC-фильтром. Это блок питания для светодиодных лент, ноутбуков, DVD-плееров и прочее.
Заключение
В начале статьи было сказано о том, что ШИМ-контроллер это устройство которое моделирует среднее значение напряжения за счет изменения ширина импульсов на основании сигнала с цепи обратной связи. Отмечу, что названия и классификация у каждого автора часто отличается, иногда ШИМ-контроллером называют простой ШИМ-регулятор напряжения, а описанное в этой статьей семейство электронных микросхем называют «Интегральная подсистема для импульсных стабилизированных преобразователей». От названия суть не меняется, но возникают споры и недопонимания.


Отправить ответ