
Силовой расчет кривошипно ползунного механизма
Пример 1. Провести силовой (статический) расчет кривошипно-ползунного механизма компрессора (рисунок 3.11), данного в положении, когда угол φ1= 45 о . Исходные данные. Длины звеньев в м: ℓАВ = 0,1, ℓВС = 0,4. Нагрузка на звенья механизма: к звену АВ в точке S1 приложена сила Р1=400 Н, она направлена вдоль звена АВ, расстояние ℓАS1 = 0,02 м; к звену ВС приложена сила Р2=600 Н, она направлена под углом φ2=60 о к линии ВС и приложена к точке S2; расстояние ℓВS2 = 0,1 м. К этому же звену приложен момент М2=8 Нм; к звену 3 приложена сила Р3=1000 Н, она направлена параллельно линии Ах и линия ее действия проходит через точку С. Уравновешивающий момент Мур приложен к звену 1.
Определить. Реакцию R43 (Н) в поступательной кинематической паре С, которая направлена перпендикулярно линии Ах и проходит через точку С; реакцию R23 (Н) во вращательной кинематической паре С; реакцию R12 (Н) во вращательной кинематической паре В; реакцию R41 (Н) во вращательной кинематической паре А и уравновешивающий момент Мур (Нм), приложенный к звену 1.
Решение. 1). Вычерчиваем механизм в масштабе μℓ


Построение механизма рассмотрено в п.2.1, §4, Примеры 1, 4.
Рассчитываем расстояния до точек приложения сил
 ,
, 
и прикладываем силы согласно заданию.
Так как расчет является статическим, то планы скоростей и ускорений строить не надо (рисунок 3.11, а).
2). Все внешние силы, действующие на звенья механизма, заданы. Поэтому и этот этап расчета выполнен.
3). Уравновешивающий момент Мур по условию приложен к звену 1, поэтому ведущим звеном следует считать звено 1.
4). От механизма может быть отделена только одна группа Ассура, состоящая из звеньев 2 и 3. Эта группа относится ко второму классу второму виду (рисунок 3.11, б).
5). Силовой расчет структурной группы 2-3. Изображаем структурную группу 2-3 в масштабе μℓ и в том же положении, что и построенная схема механизма. Составляем уравнение равновесия по первому уравнению из системы (3.17)
 .
.
В этом уравнении содержится три неизвестные: величина и направление реакции R12 и величина реакции R43. Для того чтобы его решить, т.е. построить план сил группы, необходимо реакцию R12 разложить на две составляющие: на тангенциальную реакцию  , направленную перпендикулярно звену ВС; и на нормальную реакцию
, направленную перпендикулярно звену ВС; и на нормальную реакцию  , направленную параллельно линии ВС. Тогда уравнение равновесия примет вид
, направленную параллельно линии ВС. Тогда уравнение равновесия примет вид
 (3.19)
(3.19)
Величину реакции определим из уравнения равновесия по второму уравнению системы (3.17)


Построение плана сил проводится по уравнению (3.19) в масштабе μР=20 Н/мм. На свободном поле чертежа отмечаем точку а и от нее откладываем реакцию в виде отрезка [аb]

От точки b откладываем силу Р2 в виде отрезка  Далее от точки с откладываем силу Р3 в виде отрезка
Далее от точки с откладываем силу Р3 в виде отрезка  Через точку а проводим прямую, параллельную звену ВС. Это будет линия действия силы . Через точку d проводим прямую, перпендикулярную линии Ах – линия действия реакции R43. Точка е – пересечение этих прямых.
Через точку а проводим прямую, параллельную звену ВС. Это будет линия действия силы . Через точку d проводим прямую, перпендикулярную линии Ах – линия действия реакции R43. Точка е – пересечение этих прямых.
Отрезок [ае] в масштабе μР дает искомую реакцию , отрезок [dе] – реакцию R43, а отрезок [bе] – реакцию R12. Действительные величины этих реакции определяться
Для нахождения реакции R32 составим уравнение равновесия звена 2
 (3.20)
(3.20)
Из плана сил (рисунок 3.11, в) видно, что отрезок [се] в масштабе μР дает искомую реакцию R32.
Реакция R43 должна проходить через точку С, т.к. к ползуну 3 приложены три силы, две из которых (R32 и Р3) проходят через эту точку.

Рисунок 3.11. – Силовой расчет кривошипно-ползунного
6). Силовой расчет ведущего звена. Изображаем ведущее звено (механизм I класса) в масштабе μℓ и в том же положении, что и построенная схема механизма. К звену 1 приложены: сила Р1=400 Н; реакция R12=- R21, реакция R41 и уравновешивающий момент Мур.
Составим уравнение равновесия, из которого определим величину уравновешивающего момента

где плечо h21 определится по чертежу (рисунок 3.11, г)
Реакцию R41 определим, составив уравнение равновесия ведущего звена

Из произвольно выбранной точки а откладываем отрезок  . Из точки b откладываем отрезок
. Из точки b откладываем отрезок  Замыкающий вектор даст величину и покажет направление реакции R41 (рисунок 3.11, д)
Замыкающий вектор даст величину и покажет направление реакции R41 (рисунок 3.11, д)
Пример 2. Провести силовой расчет шестизвенного механизма поперечно-строгального станка (рисунок 3.12, а), данного в положении, когда угол φ1= 45 о . Исходные данные. Длины звеньев в м: ℓАВ = 0,065, ℓАС = 0,35, ℓСD = 0,68, ℓED = 0,21, H=0,285, ℓ1 = 0,39, ℓ2 = 0,29, ℓES5 = 0,105, h=0,1. Нагрузка на звенья механизма: к звену 5 приложена сила резания Р5=200 Н; в точке S5 звена 5 приложена сила тяжести G5=60 H, она направлена вертикально вниз; к зубу колеса 1 ‘ , находящегося на звене 1, приложена в полюсе зацепления Р уравновешивающая сила Рур; радиус начальной окружности колеса 1 ‘ равен R=120 мм, угол зацепления α=20 о .
Определить. Реакции (Н) во всех кинематических парах и уравновешивающую силу Рур (Н), приложенную к звену 1, пренебрегая трением в кинематических парах.
Решение. 1) Строим схему механизма в масштабе μℓ







Построение механизма рассмотрено в п.2.1, §4, Примеры 1, 4.
Рассчитываем расстояния до точек приложения сил G5 и Р5


и прикладываем силы согласно заданию.
2) Все внешние силы, приложенные к звеньям механизма, заданы, поэтому этот пункт расчета выполнен.
3) Уравновешивающая сила Рур приложена к звену 1, поэтому ведущим звеном следует считать звено 1 (АВ – кривошип).
4) От механизма последовательно могут быть отделены две группы II класса: группа Ассура 2 вида, состоящая из звеньев 5 и 4; и группа Ассура 3 вида, состоящая из звеньев 3 и 2.
5) Силовое исследование группы Ассура 4-5 (рисунок 3.12, б). Действуют внешние силы G5, Р5, реакции R34 и R65. Реакция R34 приложена к центру шарнира D и направлена вдоль звена ED, т.к. звено 4 не нагружено внешними силами и тангенциальная составляющая  . Поэтому,
. Поэтому,  . Реакция R65 направлена перпендикулярно направляющим звена 5, точка приложения её неизвестна (условно точка приложения – точка К).
. Реакция R65 направлена перпендикулярно направляющим звена 5, точка приложения её неизвестна (условно точка приложения – точка К).
Составим уравнение равновесия всей структурной группы
 .
.
Строим план сил (рисунок 3.12, в). Выбираем масштаб сил μР=4Н/мм. От точки а откладываем силу G5 в виде отрезка [ab]
 .
.
Далее от точки b откладываем силу Р5 в виде отрезка
 .
.
Через точку а проводим линию, параллельную ED (направление линии действия реакции R34), а через точку с – линию, параллельную направляющим звена 5 (направление линии действия реакции R65), до их взаимного пересечения в точке d. Отрезок [сd] дает в масштабе μР величину реакции R65
Отрезок [dа] дает величину реакции R34
Точку К приложения реакции R65 найдем из условия равновесия звена 5
 .
.
 .
.

Рисунок 3.12. – Силовой расчет механизма
5) Силовое исследование группы Ассура 2-3 (рисунок 3.12, г). Внешние силы отсутствуют. Реакция R43приложена к точке D и направлена в противоположную сторону реакции R34. Реакция R12направлена перпендикулярно звену CD. Определим реакцию R12 из уравнения моментов относительно точки С
 ,
,
 .
.
Составляем уравнение равновесия группы Ассура 2-3
Строим план сил в масштабе μР=4 Н/мм (рисунок 3.12, д). Из произвольно выбранной точки а откладываем реакцию R12 в виде отрезка  перпендикулярно звену CD. Далее от точки b откладываем реакцию R43 в виде отрезка
перпендикулярно звену CD. Далее от точки b откладываем реакцию R43 в виде отрезка  . Соединяя точки с и а прямой, получаем величину и направление реакции R63 = [са] μР = 38·4 = 152 Н.
. Соединяя точки с и а прямой, получаем величину и направление реакции R63 = [са] μР = 38·4 = 152 Н.
6) Силовой расчет ведущего звена (рисунок 3.12, ж). Передача крутящего момента осуществляется через зубчатую передачу. К звену 1 приложены силы: реакция R21 = -R12, реакция в шарнире А (равная R61) и уравновешивающая сила Рур, приложенная в точке Р колеса 1′ под углом α к касательной, проведенной к начальной окружности.
Составим уравнение моментов звена 1 (АВ)
 ,
,
 .
.
Составляем уравнение равновесия ведущего звена
Строим план сил ведущего звена в масштабе μР=4 Н/мм (рисунок 3.12, е). Из произвольно выбранной точки а откладываем реакцию R21 в виде отрезка  перпендикулярно звену CD. Далее от точки b откладываем реакцию Рур в виде отрезка
перпендикулярно звену CD. Далее от точки b откладываем реакцию Рур в виде отрезка  . Соединяя точки с и а прямой, получаем величину и направление реакции R61 = [са] μР = 102·4 = 408 Н.
. Соединяя точки с и а прямой, получаем величину и направление реакции R61 = [са] μР = 102·4 = 408 Н.
Дата добавления: 2015-06-01 ; просмотров: 3610 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Задачей силового анализа (расчёта) является:
— определение реакций в кинематических парах механизма по известным внеш-ним силам.
— определение уравновешивающей силы, приложенной к начальному звену в т. А
— подбор мощности двигателя по уравновешивающей силе.
Силовой анализ (расчёт) механизма выполним на рассмотренном ранее простейшем кривошипно-ползунном механизме. Для этого вычертим в одном из положений механизм и приложим действующие на звенья внешние силы (рисунок 3.2). 
Рисунок 3.2 − Схема кривошипно-ползунного механизма
Силовой анализ начинается с последней присоединённой группы Ассура и заканчивается начальным звеном.
Этот механизм, как было выявлено ранее, состоит из группы Ассура
2-го класса, 2 порядка (звенья 2, 3) и механизма 1-го класса (звенья 0, 1).
Будем считать звенья 1, 3 невесомыми, тогда на звено 2 будут действовать внешняя сила инерции Fuи сила тяжести P, а на звено 3 – сила полезного сопротивления Fпс,(для ДВС − движущая сила) и реакции кинематических парах 0, 3; 1, 2.
Для определения реакций в кинематических парах 0, 3; 1, 2 вычерчиваем последнюю присоединенную группу Ассура (рисунок 3.4) и расставляем все внутренние и внешние силы, заменив действие звена 0 на звено 3 реакцией 0, 3, а действие звена 1 на звено 2 нормальной и тангенциальной реакциями F τ 12и F n 12.
 Под действием этих сил звенья находятся в равновесии.
Под действием этих сил звенья находятся в равновесии.
Рисунок 3.3 − Схема приложения внешних и внутренних сил к гр. Ассура
Составим уравнение равновесия группы Ассура
F τ 12 + F n 12 + Fu + P + F03 + Fnc = 0 (3.7)
Известными в данном уравнении являются внешние силы Fu, P, и Fnc, неизвестными F τ 12, F n 12 и F03. Тангенциальную составляющую F τ 12 можно найти из условия равновесия моментов
∑MB = 0 F τ 12 · AB + P · hp –Fиhu = 0 (3.8)
Если получим результат со знаком «-» направление F τ 12 следует поменять на противоположное.
Неизвестные F n 12 и F03 определим построением плана сил. Для этого зададимся масштабом сил. Пусть
µ = P / l (3.10)
где l – отрезок произвольной длины 50…100мм, соответствующий в масштабе силе Р.
Используя масштаб, найдём длины отрезков соответствующие внешним силам.
l Fпс = Fnc / µ, (3.11)
l F τ 12 = F τ 12 / µ. (3.13)
Построение плана сил целесообразно начинать с одной из неизвестных сил F n 12 или F03.
Выберем, например, силу F n 1,2. Так как длина отрезка, изображающая силу неизвестна, проведем произвольной длины линию, параллельную направлению силы F n 12.
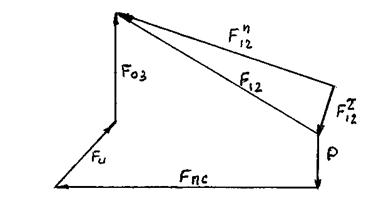 От этой линии с любого её конца откладываем последовательно отрезки lF τ 12,, lF, lP, lFu. Последним откладываем отрезок (проводим линию) параллельный другой неизвестной силе F03. Силовой многоугольник замкнётся. Результирующей всех сил будет сила F12. (рисунок 3.5).
От этой линии с любого её конца откладываем последовательно отрезки lF τ 12,, lF, lP, lFu. Последним откладываем отрезок (проводим линию) параллельный другой неизвестной силе F03. Силовой многоугольник замкнётся. Результирующей всех сил будет сила F12. (рисунок 3.5).
Рисунок 3.5 − План сил группы Ассура (звенья 2, 3).
Измерив длину отрезков lF n 12, lF12, l F03, и, умножив их на масштаб, получим численное значение этих сил (рисунок 3.5).
Рассмотрим теперь начальное звено. Вычертим начальное звено и стойку (звенья 0, 1 − рисунок 3.6). Для его уравновешиваниянеобходимо ввести дополнительную силу, уравновешивающую все приложенные к начальному звену силы. Обозначим её через Fyри приложим к т. А звена 1.

Рисунок 3.6 − Схема начального звена
Как видно из силового многоугольника (рисунок 3.5) результирующей всех сил, действующих на звенья 2, 3, является сила F12приложенная к т..
Приложим к начальному звену все внешние и внутренние силы, при этом вместо результирующей силы F12, прикладываем равную ей по величине, но противоположно направленную силу F21 .Такими силами будут Fyр ; F21; F01. Составим уравнение равновесия этих сил
Неизвестную Fyp можно найти из уравнения равновесия моментов
Mo (F21) = M (Fyp) = 0, (3.18)
или F21 ∙ l21 – Fyp ∙ OA = 0, (3.19)
Длину отрезка уравновешивающей силы найдем из соотношения
Построив план сил можно найти другую неизвестную силу F01. (рисунок 3.7) 
Рисунок 3.7 − План сил начального звена
Измерив длину отрезка F01 и, умножив её на масштаб, получим реакцию F01.
По величине уравновешивающей силы можно определить необходимую мощность двигателя, приводящую весь механизм в движение.
4. Приведённые силы
При исследовании движения механизма, находящегося под действием заданных сил, удобно все силы, действующие на звенья, заменить силами, приложенными к одному из звеньев. При этом необходимо, чтобы робота на рассматриваемом возможном перемещении или мощность, развиваемая заменяющими силами, были соответственно равны сумме робот или мощностей, развиваемых силами, приложенными к звеньям исследуемых механизмов. Удовлетворяющие этим условиям силы называются − приведёнными силами.
Звено, к которому приложены приведённые силы, называется –звеномприведения,а точка приложения сил – точкой приведения. Обычно за звено приведения принимают начальное звено (рисунок 3.8).

Рисунок 3.8 − Схема звена приведения
К точке В приложены две силы:
— Fд– приведённая движущая сила,
— Fс – приведённая сила сопротивления.
Движущая сила Fд должна производить роботу, равную работе всех движущих сил, а сила сопротивления Fс – работе всех сил сопротивления.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Только сон приблежает студента к концу лекции. А чужой храп его отдаляет. 8660 —  | 7435 —
| 7435 —  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Силовое исследование структурной группы графическим методом.
Выделим из механизма структурную группу. Вычертим её в заданном положении и в том же масштабе, что и на плане положений механизма. Приложим к структурной группе силы тяжести, силы инерции, моменты инерции и реакции отброшенных связей.
Вычислим величины этих сил.
Массы звеньев вычислим по формуле:


где — коэффициент удельной массы i-го звена, кг/м

— длина i-го звена.
Коэффициент удельной массы выбирается в зависимости от вида i-го звена:
- — для кривошипов и кулис — =(7…9)
- -для коромысел — =(12…20)


Примем для кривошипа равным 8, для коромысла примем = 13.
Силы тяжести вычислим по формуле:




= 10 = 10 3,6 = 36 Н

= 10 = 10 25,2 =252 Н






Вектор ускорения центра масс ползуна совпадает с вектором ускорения точки В, тогда = .

Вектор силы инерции направлен противоположно вектору соответствующего ускорения центра тяжести звена.
Момент инерции звена относительно центра масс вычислим по формуле:










Моменты сил инерции звеньев вычислим по формуле:



Момент сил инерции направлен противоположно соответствующему угловому ускорению звена.


Сила полезного сопротивления приложена к ползуну в точке В и направлена противоположно скорости . Примем = 5000 Н.
Известные силы, приложенные к звеньям механизма, сводим в табл. 2.



Приложим к структурной группе действующие на нее силы. Действие звена 1 на звено 2 заменяем силой реакции , приложенной в шарнире А. Раскладываем эту силу на две составляющие нормальную , направленную вдоль звена AB и касательную , направленную перпендикулярно звену AB. Направления этих сил задаем произвольно. Действие неподвижной направляющей ползуна заменяем силой реакции , направленной перпендикулярно оси неподвижной направляющей хх (рис. 6).
Для определения касательной составляющей составляем уравнение суммы моментов сил, действующих на звено 2, относительно точки B:




Знак "" говорит о том, что выбранное направление вектора неверно. Вектор направляем в противоположную сторону.



Для построения плана сил задаем масштабный коэффициент сил тогда длины векторов, изображающих силы на плане, определяется следующим образом:








Действительные и масштабные величины сил сводим в табл. 3.
  |
Действительная величина, Н
Масштабная величина, мм






Для построения плана сил из выбранной точки отложим отрезки, соответствующие по длине и направлению величинам и направлениям сил, начиная с вектора и заканчивая вектором . Чтобы замкнуть многоугольник сил, из начала вектора проведем прямую (рис.7), параллельную направлению силы (параллельно AB), а из конца вектора прямую, параллельную направлению силы (перпендикулярно оси xx). В точке пересечения получаем начало вектора и конец вектора . Все силы направляем по обходу контура. Для определения вектора складываем векторы и :


Определяем действительные величины сил:
Чтобы определить реакцию , действующую со стороны второго звена на третье, составляем векторное уравнение сил, действующих на звено 3:





Так как на плане сил для группы звеньев 2 и 3 эти силы отложены по порядку, для определения силы соединим конец вектора с началом вектора и направим вектор по обходу контура.
Силовое исследование ведущего звена.




К ведущему звену приложим силы , , уравновешивающий момент , направленный по вращению звена, а также силы реакции и (рис. 8, а). Сила реакции заменяет действие звена 2, приложена в шарнире А, при этом , а сила реакции заменяет действие стойки, эта сила неизвестна, как и уравновешивающий момент .


Для определения составляем уравнение суммы моментов сил, действующих на звено 1, относительно точки О:


Определяем уравновешивающий момент по формуле:
Для определения силы реакции составляем векторное уравнение суммы сил, действующих на звено 1:

Задаем масштабный коэффициент сил , определяем длины отрезков, изображающих векторы сил на плане сил (рис. 8, б).




Действительные и масштабные величины сил сводим в табл. 4.
 |
Действительная величина, Н
Масштабная величина, мм
Строим план сил, из которого определяем :
Результаты силового исследования заносим в табл. 5.


Отправить ответ