
Кинематика кривошипно ползунного механизма
Содержание:
 1 – стойка
1 – стойка
4 – поршень / ползун
φ – угол поворота
8. Экспериментальны метод исследования механизмов с помощью датчиков
При экспериментальном методе исследования механизмов кинематические характеристики точек и звеньев механизма регистрируются с помощью датчиков. Датчики регистрируют, а потом и преобразуют кинематические параметры в пропорциональные электрические сигналы, которые после усиления регистрируются различными приборами. В последние годы для регистрации и обработки результатов экспериментальных исследований широко используются ПЭВМ. На рис. показана экспериментальная установка для исследования кинематических характеристик кривошипно-кулисного механизма пресс-автомата.
В этой экспериментальной установке используются для
перемещения выходного звена — потенциометрический датчик перемещения, в котором пропорционально положению движка потенциометра изменяется его сопротивление;
скорости выходного звена — индукционный датчик скорости, в котором напряжение на концах катушки движущейся в поле постоянного магнита пропорционально скорости катушки;
ускорения выходного звена — тензометрическиий акселерометр. Он состоит из пластинчатой пружины, один конец которой закреплен на выходном звене механизма, а на втором закреплена масса. На пластину наклеены проволочные тензопреобразователи. При движении выходного звена с ускорением инерционность массы вызывает изгиб пластины, деформацию тензопреобразователей и изменение их сопротивления, пропорциональное ускорению выходного звена.
 А – первичная обмотка
А – первичная обмотка
Б – вторичная обмотка
С – часть М, связывающая А и Б обмотки
9. Преобразование механизма методом замены стойки
Характер абсолютных движений звеньев зависит от того, какое из звеньев кинематической цепи является стойкой.
Относительное движение звеньев не зависит от выбора стойки, поскольку определяется характером подвижной связи кинематической пары.
10. Условия проворачиваемости кривошипа в шарнирном четырёхзвеннике
При проектировании (синтезе) четырёхшарнирного механизма одним из учитываемых условий может быть проворачиваемость звеньев, то есть наличие одного или двух кривошипов. Это зависит от соотношения длин звеньев. Например, для того, чтобы звено АВ четырёхзвенника (рис. 8.1) могло стать кривошипом, оно должно последовательно пройти через два крайних положения. Используя три положения механизма, получим следующие условия: для положений 1, 2, 3, предварительно обозначив длины звеньев: 



то есть сумма длин кривошипа и любого другого звена меньше суммы остальных звеньев.

Сложим попарно полученные неравенства и получим: 

 , то есть кривошип является самым коротким звеном. А если данные условия не выполняются, то механизм будет либо двухкривошипным, либодвухкоромысловым. Эти условия используются при геометрическом синтезе.
, то есть кривошип является самым коротким звеном. А если данные условия не выполняются, то механизм будет либо двухкривошипным, либодвухкоромысловым. Эти условия используются при геометрическом синтезе.
Описание: Вторая группа проблем посвящена проектированию механизмов с заданными структурными кинематическими и динамическими свойствами для осуществления требуемых движений т. Вывод зависимостей для расчета кинематических параметров. Это будет выглядеть так: Далее находим аналог ускорений для этого дифференцируем предыдущее выражение. В итоге для лучшего анализа механизма принимаем первое угловое положение входного звена.
Дата добавления: 2015-11-02
Размер файла: 284.45 KB
Работу скачали: 33 чел.
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
Министерство образования и науки РФ
Государственное образовательное учреждение высшего
“Тихоокеанский государственный университет”
Кафедра: “Детали машин ”
Курсовая работа по теории механизмов и машин.
Выполнила: студентка группы КТ-31
Руководитель работы: доцент
Хабаровск 2015 г.
Теория механизмов есть наука, изучающая строение, кинематику и динамику механизмов в связи с их анализом и синтезом.
Проблемы теории механизмов могут быть разбиты на две группы. Первая группа
проблем посвящена исследованию структурных, кинематических и динамических свойств механизмов, т.е. анализу механизмов.
Вторая группа проблем посвящена проектированию механизмов с заданными структурными, кинематическими и динамическими свойствами для осуществления требуемых движений, т.е. синтезу механизмов.
Движение механизмов зависит от их строения и сил, на них действующих. поэтому удобно при избежании теории механизмов, проблемы анализа механизмов разбить на две части:
А) структурный и кинематический анализ;
Б) динамический анализ механизмов.
Структурный и динамический анализы механизмов имеют своей целью изучение теории строения механизмов, исследование движения тел, их образующих, с геометрической точки зрения, независимо от сил, вызывающих движение этих тел.
Динамический анализ механизмов имеет собой целью изучение методов определения сил, действующих на тела, образующие механизм, во время движения этих тел, и изучение взаимосвязи между движениями этих тел, силами на них действующими, и массами, которыми обладают эти тела.
Проблемы синтеза механизмов удобно излагать по видам механизмов поэтому задачей синтеза является проектирование механизма предварительно выбранной структуры по заданным кинематическим и динамическим условиям.
Курсовой проект, включает в себя исследование кривошипно-ползунного механизма.
Исследование кривошипно- ползунного механизма составляет наибольший по объёму раздел курсового проекта по теории механизмов и машин и включает четыре этапа:
- Структурный анализ
- Кинематический анализ
- Анализ динамики установившегося движения
- Кинестатический расчет .
Кинестатический расчет невозможно сделать точно без учета динамических явлений в машине, а динамику движения невозможно без предварительного исследования кинематики. Следовательно, необходимо решать задачи структуры, кинематики, динамики движения и кинетостатики.
- Структурный анализ.
- Кинематический анализ.
- Анализ динамики установившегося движения.
- Кинетостатический анализ.
Кривошипно-ползунный (кривошипно-шатунный) механизм — четырехзвенник с тремя вращательными и одной поступательной кинематическими парами. Он предназначен для преобразования вращательного движения кривошипа 1 в поступательное движение ползуна 3. При этом шатун 2 совершает сложное плоскопараллельное движение (рис.2).
Скорость и ускорение ползуна могут быть определены графически методом плана скоростей и ускорений.
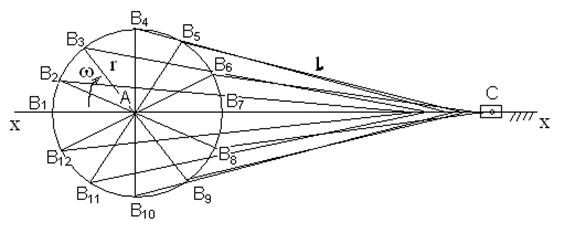
Построение планов скоростей и ускорений начинаем с построения плана положений механизма. Для этого в масштабе КL вычерчиваем кинематическую схему механизма, с обозначением звеньев и направлением вращения кривошипа w [1/c].
Разбиваем окружность (геометрическое место точек В кривошипа) на равные углы (30 о ). В1— крайнее левое положение ползуна. Таким образом получили 13 положений точки В (В1 и В13 совпадают). Делая засечки на линии х-х (линия движения ползуна) радиусом ВС, находим соответствующие 13 положений точки С ползуна.
Из теоретической механики известно, что плоскопараллельное движение фигуры в ее плоскости складывается из поступательного движения вместе с точкой фигуры (полюсом) и вращательного движения вокруг этого полюса.
Скорость ползуна: 
Для нахождения скорости ползуна достаточно знать величину и направление одной составляющей векторного уравнения и направление двух остальных составляющих.
 — скорость ползуна (направлена вдоль оси движения ползуна)
— скорость ползуна (направлена вдоль оси движения ползуна)
 — скорость точки В кривошипа (направлена перпендикулярно радиусу кривошипа)
— скорость точки В кривошипа (направлена перпендикулярно радиусу кривошипа)
 — относительная скорость точки С ползуна относительно полюса В (направлена перпендикулярно шатуну ВС).
— относительная скорость точки С ползуна относительно полюса В (направлена перпендикулярно шатуну ВС).
Построение плана скоростей. Из произвольно выбранного полюса Р (рис.3) откладываем вектор скорости  перпендикулярно радиусу кривошипа произвольной величины и вводим масштабный коэффициент скорости
перпендикулярно радиусу кривошипа произвольной величины и вводим масштабный коэффициент скорости  . Проводим направления скоростей и . После построения плана скоростей величину скорости ползуна находим, умножая длину вектора
. Проводим направления скоростей и . После построения плана скоростей величину скорости ползуна находим, умножая длину вектора  на масштабный коэффициент скорости. На рис.2.показаны примеры построения плана скоростей и плана ускорений для угла поворота кривошипа
на масштабный коэффициент скорости. На рис.2.показаны примеры построения плана скоростей и плана ускорений для угла поворота кривошипа  =30 о .
=30 о .
Построение плана ускорений. Ускорение точки С ползуна складывается из ускорения точки В кривошипа и двух составляющих (нормального и тангенциального) относительного ускорения:

 — полное ускорение точки В кривошипа (направлено к центру вращения кривошипа)
— полное ускорение точки В кривошипа (направлено к центру вращения кривошипа)
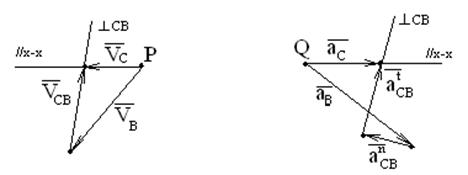
 — нормальное ускорение шатуна СВ (направлено вдоль шатуна от С к В)
— нормальное ускорение шатуна СВ (направлено вдоль шатуна от С к В)
 — тангенциальная составляющая относительного ускорения (направлена перпендикулярно шатуну СВ).
— тангенциальная составляющая относительного ускорения (направлена перпендикулярно шатуну СВ).
Из произвольно выбранного полюса Q (рис.3) откладываем вектор ускорения  произвольной величины и вводим масштабный коэффициент ускорения
произвольной величины и вводим масштабный коэффициент ускорения  . Из конца вектора откладываем
. Из конца вектора откладываем  , длина вектора
, длина вектора  . Из построения находим величину
. Из построения находим величину  , умножая длину вектора на масштабный коэффициент ускорения.
, умножая длину вектора на масштабный коэффициент ускорения.
Дата добавления: 2015-11-06 ; просмотров: 1834 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ


Отправить ответ