
Однофазный синхронный двигатель переменного тока
Содержание:
- 1 Содержание
- 2 Принцип действия [ править | править код ]
- 3 Классификация электродвигателей [ править | править код ]
- 3.1 Двигатели постоянного тока [ править | править код ]
- 3.2 Двигатели пульсирующего тока [ править | править код ]
- 3.3 Двигатели переменного тока [ править | править код ]
- 3.4 Универсальный коллекторный электродвигатель [ править | править код ]
- 3.5 Синхронный электродвигатель возвратно-поступательного движения [ править | править код ]
- 4 История [ править | править код ]
- 5 Электродвигатель у бактерий [ править | править код ]
 Само название этого электротехнического устройства свидетельствует о том, что электрическая энергия, поступающая на него, преобразуется во вращательное движение ротора. Причем прилагательное «асинхронный» характеризует несовпадение, отставание скоростей вращения якоря от магнитного поля статора.
Само название этого электротехнического устройства свидетельствует о том, что электрическая энергия, поступающая на него, преобразуется во вращательное движение ротора. Причем прилагательное «асинхронный» характеризует несовпадение, отставание скоростей вращения якоря от магнитного поля статора.
Слово «однофазный» вызывает неоднозначное определение. Связано это с тем, что термин «фаза» в электрике определяет несколько явлений:
сдвиг, разность углов между векторными величинами;
потенциальный проводник двух, трех или четырехпроводной электрической схемы переменного тока;
одну из обмоток статора или ротора трехфазного двигателя либо генератора.
Поэтому сразу уточним, что однофазным электродвигателем принято называть тот, который работает от двухпроводной сети переменного тока, представленной фазным и нулевым потенциалом. Количество обмоток, вмонтированных в различных конструкциях статоров, на это определение не влияют.
Конструкция электродвигателя
По своему техническому устройству асинхронный двигатель состоит из:
1. статора — статической, неподвижной части, выполненной корпусом с расположенными на нем различными электротехническими элементами;
2. ротора, вращаемого силами электромагнитного поля статора.
Механическое соединение этих двух деталей выполнено за счет подшипников вращения, внутренние кольца которых посажены на подогнанные гнезда вала ротора, а внешние вмонтированы в защитные боковые крышки, закрепляемые на статоре.

Ротор
Его устройство у этих моделей такое же, как у всех асинхронных двигателей: на стальном валу смонтирован магнитопровод из шихтованных пластин на основе мягких сплавов железа. На его внешней поверхности выполнены пазы, в которые вмонтированы стержни обмоток из алюминия или меди, закороченные по концам на замыкающие кольца.
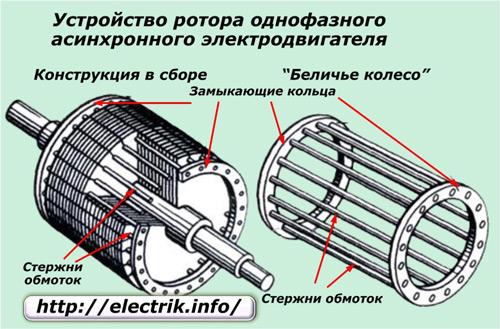
В обмотке ротора протекает электрический ток, индуцируемый магнитным полем статора, а магнитопровод служит для хорошего прохождения создаваемого здесь же магнитного потока.
Отдельные конструкции ротора у однофазных двигателей могут быть выполнены из немагнитных или ферромагнитных материалов в форме цилиндра.
Статор
Конструкция статора также представлена:
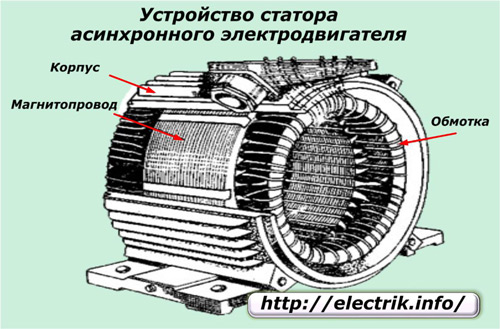
Его основное назначение заключается в генерировании неподвижного или вращающегося электромагнитного поля.
Статорная обмотка обычно состоит из двух контуров:
У самых простых конструкций, предназначенных для ручной раскрутки якоря, может быть выполнена всего одна обмотка.
Принцип работы асинхронного однофазного электрического двигателя
С целью упрощения изложения материала представим, что обмотка статора выполнена всего одним витком петли. Ее провода внутри статора разносят по кругу на 180 угловых градусов. По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Он создает не вращающееся, а пульсирующее магнитное поле.
Как возникают пульсации магнитного поля
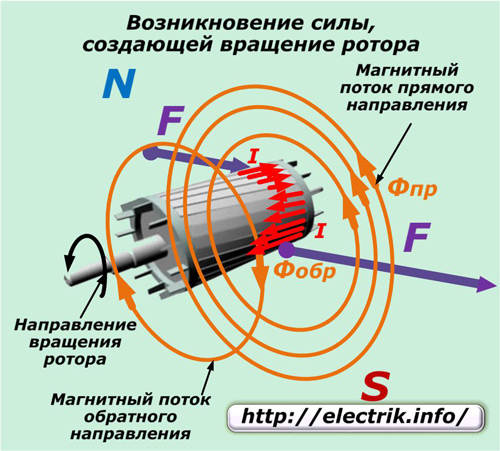
Разберем этот процесс на примере протекания положительной полуволны тока в моменты времени t1, t2, t3.
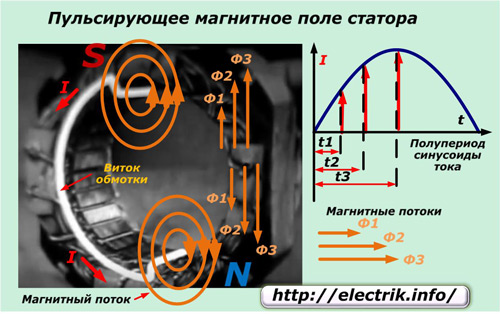
Она проходит по верхней части токопровода по направлению к нам, а по нижней — от нас. В перпендикулярной плоскости, представленной магнитопроводом, вокруг проводника возникают магнитные потоки Ф.
Изменяющиеся по амплитуде токи в рассматриваемые моменты времени создают разные по величине электромагнитные поля Ф1, Ф2, Ф3. Поскольку ток в верхней и нижней половине один и тот же, но виток изогнут, то магнитные потоки каждой части направлены встречно и уничтожают действие друг друга. Определить это можно по правилу буравчика или правой руки.
Как видим, при положительной полуволне вращения магнитного поля не наблюдается, а происходит только его пульсация в верхней и нижней части провода, которая еще и взаимно уравновешивается в магнитопроводе. Этот же процесс происходит при отрицательном участке синусоиды, когда токи изменяют направление на противоположное.
Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения.
Как создается вращение ротора в пульсирующем поле
Если придать ротору вращение, хотя бы рукой, то он будет продолжать это движение. Для объяснения этого явления покажем, что суммарный магнитный поток изменяется по частоте синусоиды тока от нуля до максимального значения в каждом полупериоде (с изменением направления на противоположное) и состоит из двух частей, образуемых в верхней и нижней ветвях, как показано на рисунке.
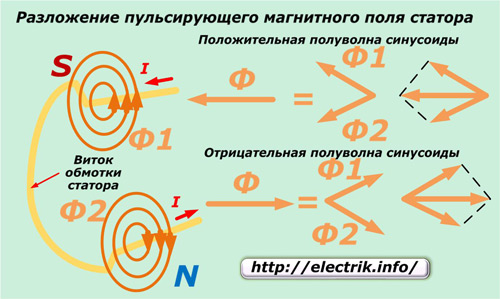
Магнитное пульсирующее поле статора состоит из двух круговых с амплитудой Фмакс/2 и двигающихся в противоположных направлениях с одной частотой.
В этой формуле обозначены:
nпр и nобр частоты вращения магнитного поля статора в прямом и обратном направлениях;
n1 — скорость вращающегося магнитного потока (об/мин);
p — число пар полюсов;
f — частота тока в обмотке статора.
Теперь рукой придадим вращение двигателю в одну сторону, и он сразу подхватит движение за счет возникновения вращающегося момента, вызванного скольжением ротора относительно разных магнитных потоков прямого и обратного направлений.
Примем, что магнитный поток прямого направления совпадает с вращением ротора, а обратный, соответственно, будет противоположен. Если обозначить через n2 частоту вращения якоря в об/мин, то можно записать выражение n2
Например, электродвигатель работает от сети 50 Гц с n1=1500, а n2=1440 оборотов в минуту. Его ротор имеет скольжение относительно магнитного потока прямого направления Sпр=0,04 и частоту тока f2пр=2 Гц. Обратное же скольжение Sобр=1,96, а частота тока f2обр=98 Гц.
На основании закона Ампера при взаимодействии тока I2пр и магнитного поля Фпр появится вращающий момент Мпр.
Здесь величина постоянного коэффициента сМ зависит от конструкции двигателя.
При этом также действует обратный магнитный поток Мобр, который вычисляется по выражению:
В итоге взаимодействия этих двух потоков появится результирующий:
Внимание! При вращении ротора в нем наводятся токи разной частоты, которые создают моменты сил с разными направлениями. Поэтому якорь двигателя будет совершать вращение под действием пульсирующего магнитного поля в ту сторону, с которой он начал вращение.
Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. Противодействие тормозного, обратного магнитного поля Мобр сказывается совсем незначительно из-за различия частот токов прямого и обратного направлений.
f2обр обратного тока значительно превышает f2пр, а создаваемое индуктивное сопротивление Х2обр сильно превышает активную составляющую и обеспечивает большое размагничивающее действие обратного магнитного потока Фобр, который в итоге этого уменьшается.
Поскольку коэффициент мощности у двигателя под нагрузкой небольшой, то обратный магнитный поток не может оказать сильное воздействие на вращающийся ротор.
Когда же одна фаза сети подана на двигатель с неподвижным ротором (n2=0), то скольжения, как прямое, так и обратное равны единице, а магнитные поля и силы прямого и обратного потоков уравновешены и вращения не возникает. Поэтому от подачи одной фазы невозможно раскрутить якорь электродвигателя.
Как быстро определить частоту вращения двигателя:
Как создается вращение ротора у однофазного асинхронного двигателя
За всю историю эксплуатации подобных устройств разработаны следующие конструкторские решения:
1. ручная раскрутка вала рукой или шнуром;
2. использование дополнительной обмотки, подключаемой на время запуска за счет омического, емкостного или индуктивного сопротивления;
3. расщепление короткозамкнутым магнитным витком магнитопровода статора.
Первый способ использовался в начальных разработках и не стал применяться в дальнейшем из-за возможных рисков получения травм при запуске, хотя он не требует подключения дополнительных цепочек.
Применение фазосдвигающей обмотки в статоре
Чтобы придать начальное вращение ротору к статорной обмотке дополнительно на момент запуска подключают еще одну вспомогательную, но только сдвинутую по углу на 90 градусов. Ее выполняют более толстым проводом для пропускания бо́льших токов, чем протекающие в рабочей.
Схема подключения такого двигателя показана на рисунке справа.

Здесь для включения применяется кнопка типа ПНВС, которая специально создана для таких двигателей и широко использовалась в работе стиральных машин, выпускаемых при СССР. У этой кнопки сразу включаются 3 контакта таким образом, что два крайних после нажатия и отпускания остаются зафиксированы во включенном состоянии, а средний — кратковременно замыкается, а потом под действием пружины возвращается в исходное положение.
Замкнутые же крайние контакты можно отключить нажатием на соседнюю кнопку «Стоп».

Кроме кнопочного выключателя для отключений дополнительной обмотки в автоматическом режиме используются:
1. центробежные переключатели;
2. дифференциальные или токовые реле;
Для улучшения запуска двигателя под нагрузкой применяются дополнительные элементы в фазосдвигающей обмотке.
Подключение однофазного двигателя с пусковым сопротивлением
В такой схеме к статорной дополнительной обмотке последовательно монтируется омическое сопротивление. При этом намотка витков выполняется биффилярным способом, обеспечивающим коэффициент самоиндукции катушки очень близким к нулю.
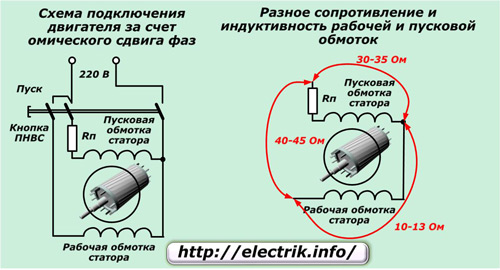
За счет выполнения этих двух приемов при прохождении токов по разным обмоткам между ними возникает сдвиг по фазе порядка 30 градусов, чего вполне достаточно. Разность углов создается за счет изменения комплексных сопротивлений в каждой цепи.
При этом методе еще может встречаться пусковая обмотка с заниженной индуктивностью и увеличенным сопротивлением. Для этого применяют намотку с маленьким числом витков провода заниженного поперечного сечения.
Подключение однофазного двигателя с конденсаторным запуском
Емкостной сдвиг токов по фазе позволяет создать кратковременное подключение обмотки с последовательно соединенным конденсатором. Эта цепочка работает только во время выхода двигателя на режим, а затем отключается.
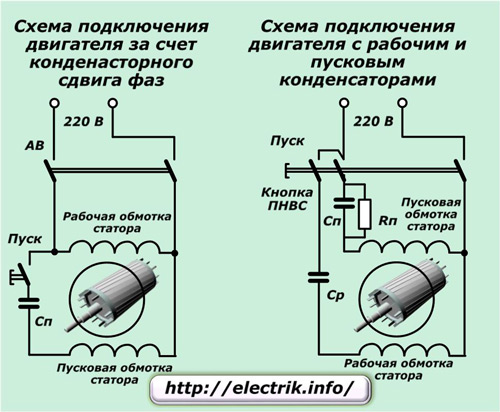
У конденсаторного запуска создается наибольший крутящий момент и более высокий коэффициент мощности, чем при резистивном или индуктивном способе запуска. Он может достигать величины 45÷50% от номинального значения.
В отдельных схемах к цепочке рабочей обмотки, которая постоянно включена, тоже добавляют емкость. За счет этого добиваются отклонения токов в обмотках на угол порядка π/2. При этом в статоре сильно заметен сдвиг максимумов амплитуд, который обеспечивает хороший крутящий момент на валу.
За счет этого технического приема двигатель при пуске способен выработать больше мощности. Однако, такой метод используют только с приводами тяжелого запуска, например, для раскрутки барабана стиральной машины, заполненного бельем с водой.
Конденсаторный запуск позволяет изменять направление вращения якоря. Для этого достаточно сменить полярность подключения пусковой или рабочей обмотки.
Подключение однофазного двигателя с расщепленными полюсами
У асинхронных двигателей с небольшой мощностью порядка 100 Вт используют расщепление магнитного потока статора за счет включения в полюс магнитопровода короткозамкнутого медного витка.
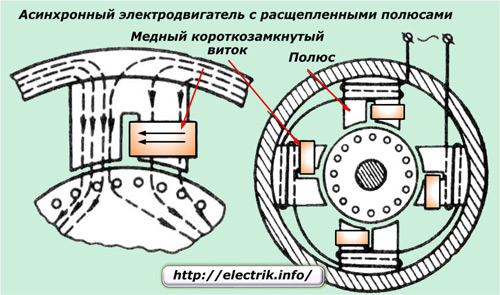
Разрезанный на две части такой полюс создает дополнительное магнитное поле, которое сдвинуто от основного по углу и ослабляет его в месте охваченного витком. За счет этого создается эллиптическое вращающееся поле, образующее момент вращения постоянного направления.
В подобных конструкциях можно встретить магнитные шунты, выполненные стальными пластинками, которые замыкают края наконечников статорных полюсов.
Двигатели подобных конструкций можно встретить в вентиляторных устройствах обдува воздуха. Они не обладают возможностью реверса.

Содержание
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя [ править | править код ]
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.

На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f <displaystyle f> 
>>
При частоте 50 Гц получаем для p <displaystyle p>
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и закорачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трёхфазная обмотка, похожая на обмотку статора, включённую, например, звездой; начала фаз соединяются с тремя контактными кольцами, закреплёнными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щётки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Асинхронные электродвигатели широко применяются в тяжелой промышленности в качестве вспомогательных машин для компрессоров или выпрямительных установок.
Асинхронные электродвигатели имеют ряд преимуществ перед коллекторными, такие как :меньший износ якоря за счет отсутствия коллектора, вариативность управления, более высокий КПД и простота конструкции.
Классификация электродвигателей [ править | править код ]
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создаётся вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока [ править | править код ]

Двигатель постоянного тока — двигатель, переключение фаз в котором осуществляется прямо в самом двигателе. Благодаря этому такой двигатель может питаться постоянным током, но так же и переменным.
Данная группа двигателей в свою очередь разделяется по способу переключения фаз и наличию обратной связи подразделяется на:
Щёточно-коллекторный узел обеспечивает электрическое синхронное переключение цепей вращающейся части машины и является наиболее ненадёжным и сложным в обслуживании конструктивным элементом. [1]
По типу возбуждения коллекторные двигатели можно разделить на:
- Двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- Двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения);
- Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения);
- Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть — параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики).
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели в котором переключение фаз осуществляется с помощью специального электронного блока (инвертора), могут быть с обратной связью с использованием датчика положения ротора, либо без обратной связи, фактически аналог асинхронного.
Двигатели пульсирующего тока [ править | править код ]
Двигатель пульсирующего тока — электрический двигатель, питание которого осуществляется пульсирующим электрическим током. По конструкции очень близок к двигателю постоянного тока. Его конструктивными отличиями от двигателя постоянного тока являются шихтованные вставки в остове, шихтованные дополнительные полюса, большее число пар полюсов, наличие компенсационной обмотки. Применяется на электровозах с установками для выпрямления переменного тока [2]
Двигатели переменного тока [ править | править код ]

Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения.
Синхронные электродвигатели подразделяются на [3] :
- синхронный двигатель с обмотками возбуждения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше). [4]
- синхронный двигатель с постоянными магнитами;
- синхронный реактивный двигатель;
- гистерезисный двигатель;
- шаговый двигатель;
- гибридный синхронный реактивный двигатель с постоянными магнитами;
- реактивно-гистерезисный двигатель.
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель [ править | править код ]
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном, и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127, 220 В, для постоянного 110, 220 В. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 Гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока. Строго говоря, универсальный коллекторный двигатель является коллекторным электродвигателем постоянного тока с последовательно включёнными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети. Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону. Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию). Для уменьшения потерь на вихревые токи статор выполняют наборным из изолированных пластин. Особенностью (в большинстве случаев — достоинством) работы такого двигателя именно на переменном токе (а не на постоянном такого же напряжения) является то, что в режиме малых оборотов (пуск и перегрузка) индуктивное сопротивление обмоток статора ограничивает потребляемый ток и соответственно максимальный момент двигателя (оценочно) до 3—5 от номинального (против 5—10 при питании того же двигателя постоянным током). Для сближения механических характеристик у двигателей общего назначения может применяться секционирование обмоток статора — отдельные выводы (и меньшее число витков обмотки статора) для подключения переменного тока.
Синхронный электродвигатель возвратно-поступательного движения [ править | править код ]
Принцип его работы заключается в том, что подвижная часть двигателя представляет собой постоянные магниты, закреплённые на штоке. Через неподвижные обмотки пропускается переменный ток и постоянные магниты под действием магнитного поля, создаваемого обмотками, перемещают шток возвратно-поступательным образом. [5]
История [ править | править код ]
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода [6] . Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 г. он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б.С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 г. Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Электродвигатель у бактерий [ править | править код ]
Электродвигатель из нескольких белковых молекул преобразует энергию электрического тока в виде движения протонов во вращение жгутика, используемого для передвижения некоторыми видами бактерий. [7] [8]
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.

Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.

Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.


Отправить ответ