
Регулировка частоты вращения двигателя постоянного тока
Содержание:
 Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
 В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
 Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
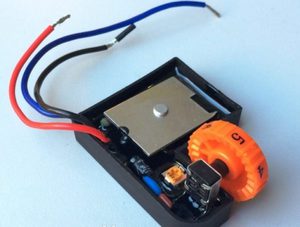
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
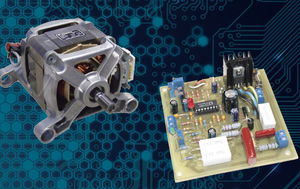
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
 Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
 Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
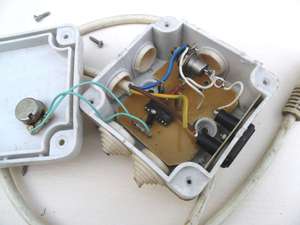
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
 Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
 Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Уравнение (3.3) показывает, что для управления частотой вращения двигателя можно использовать напряжение на якоре, сопротивление цепи якоря и поток возбуждения. Ток якоря зависит от момента (3.4) и определяется нагрузкой двигателя, поэтому он не может быть параметром управления.
Напряжение на якоре можно менять с помощью транзисторных или тиристорных регулируемых вторичных источников постоянного напряжения. Это наиболее удобный и современный способ. Он экономичен и обеспечивает "жесткие" характеристики, то есть при заданном напряжении якоря частота вращения мало зависит от момента (вследствие малого сопротивления цепи якоря, см. уравнения (3.3, 3.4)). В качестве регулируемого источника напряжения можно использовать ГПТ, однако это техническое решение морально устарело.
Сопротивление цепи якоря изменяют посредством включения в нее дополнительных резисторов. Это позволяет регулировать частоту вращения ДПТ в широких пределах. Однако, характеристики двигателя получаются мягкими, что часто бывает неудобно, и в резисторах бесполезно выделяется большая мощность. Кроме того, обгорают контакты, подключающие резисторы. Все это ограничивает применение такого способа регулировки скорости.
Поток возбуждения можно менять, регулируя ток возбуждения. Обычно это делают, включая в цепь возбуждения дополнительные резисторы. Если двигатель не последовательного возбуждения, то ток возбуждения намного меньше тока якоря. Поэтому в дополнительных резисторах выделяется сравнительно небольшая мощность. Механические характеристики получаются жесткими, что обычно и требуется. Однако, такой способ управления позволяет лишь увеличивать скорость двигателя, начиная с основной частоты вращения, которая достигается при максимальном потоке возбуждения.
Регулировка напряжения и тока ГПТ
В соответствии с (3.1 и 3.2) напряжение и ток ГПТ зависят от ЭДС генератора, которую можно регулировать, меняя поток возбуждения и (или) частоту вращения ГПТ.
Поток возбуждения ГПТ можно легко и быстро изменять с помощью электронных устройств, позволяющих отслеживать состояние нагрузки и генератора. Можно также вручную включать в цепь возбуждения резисторы.
Менять частоту вращения ГПТ часто бывает неудобно или невозможно, так как для этого нужно изменять частоту вращения двигателя, который приводит в действие генератор. Поэтому такой способ регулировки напряжения и тока ГПТ применяется мало.
Пуск и реверс ДПТ
При разгоне двигателя вследствие малой скорости ЭДС вращения мала по сравнению с тем значением, которое она имеет в номинальном режиме. Поэтому напряжение источника питания при пуске уравновешивается в основном сопротивлением и током цепи якоря (3.1, 3.2). Сопротивление самого якоря очень мало, и при непосредственном включении ДПТ ток якоря будет в десятки раз больше номинального. Это может привести к перегрузке электрической цепи якоря и к механической аварии вследствие увеличения момента на валу двигателя.
Для ограничения пускового тока последовательно с якорем включают дополнительные резисторы, которые по мере разгона выводят из цепи.
Если двигатель питается от регулятора напряжения, то этот же регулятор используется для пуска.
Чтобы реверсировать ДПТ, нужно изменить направление тока якоря или основного магнитного поля двигателя. Для этого надо поменять полярность включения якоря или обмоток возбуждения.
Пуск ГПТ
При пуске ГПТ с параллельным или смешанным возбуждением сопротивление нагрузки не должно быть меньше некоторого критического значения, иначе обмотка возбуждения не получит достаточно тока для создания нормального магнитного поля.
Если сопротивление нагрузки меньше критического, то нужно сначала включить генератор и подождать, когда ток возбуждения и напряжение якоря достигнут номинальных значений, а затем подключать нагрузку.
Синхронные машины
Общая характеристика
Синхронные машины (СМ) — это машины переменного тока. Они могут работать как двигатели или генераторы в зависимости от момента на валу. Они имеют следующие основные особенности:
1) Их частота вращения постоянна и равна частоте вращения магнитного поля асинхронных двигателей (см. п. 2):
 (об/мин), (4.1)
(об/мин), (4.1)
где f – частота напряжения сети, к которой подключена СМ, р – число пар полюсов СМ, 60 — число секунд в минуте.
Исключение составляют синхронные генераторы (СГ), работающие автономно, без параллельного подключения к другим источникам переменного напряжения (например, генераторы, питающие бортовые сети автомобилей). Частота вращения таких СГ определяется частотой вращения первичных двигателей, но она также связана с частотой напряжения формулой (4.1).
2) Сдвиг фаз между напряжением и током СМ можно регулировать, изменяя ток возбуждения. Это очень ценное качество позволяет использовать СМ не только по прямому назначению, но еще и для компенсации реактивного тока потребителей электроэнергии (для повышения cosj, см. п. 14).
Назначение
СГ вырабатывают электроэнергию на электростанциях — это самая важная область применения СМ. В последнее время СГ малой мощности используют для питания бортовых сетей транспортных средств, так как они проще, дешевле и надежнее, чем генераторы постоянного тока. При этом постоянное напряжение, нужное для бортовой сети, получают из синусоидального напряжения генератора с помощью выпрямителя. СГ используют также в передвижных дизельных электростанциях.
По сравнению с асинхронными двигателями синхронные двигатели (СД) обладают меньшими габаритами и массой и большим к.п.д.
Однако, для питания обмотки возбуждения им нужен дополнительный источник постоянного напряжения. Конструкция и пуск СД сложнее, чем у асинхронного двигателя с короткозамкнутым ротором. Пусковой момент СД меньше, чем у асинхронного двигателя с фазным ротором.
Поэтому СД в основном применяются в очень мощных электроприводах с редкими пусками. СД используют также там, где нужна строго постоянная частота вращения. Иногда мощные СД применяют только как компенсаторы реактивного тока, без нагрузки на валу.
Устройство
Статор СМ устроен так же, как статор асинхронного двигателя (рис. 4.1). Сердечник статора — это пустотелый стальной цилиндр. Для подавления вихревых токов он набран из отдельных колец листовой электротехнической стали. На его внутренней поверхности имеются пазы, в которых уложена трехфазная обмотка из медного провода.
 Рис. 4.1. СМ с неявно- полюсным ротором в разрезе (схематический рисунок). Рис. 4.1. СМ с неявно- полюсным ротором в разрезе (схематический рисунок). |
Ротор СМ – это электромагнит, обмотки которого питаются постоянным током возбуждения через контактные кольца и щетки. У маломощных СМ в качестве роторов используют постоянные магниты. Ротор реактивного СД — это просто зубчатый стальной цилиндр.
Ротор СМ имеет столько же пар полюсов, сколько статор. Роторы СМ бывают явнополюсными и неявнополюсными. У явнополюсных роторов каждый полюс выполняется отдельно и имеет свою обмотку, у неявнополюсных полюса образуются за счет распределения обмотки в пазах цилиндрического сердечника.
Сердечники роторов также набираются из отдельных стальных пластин, но более толстых, чем пластины статора, так как магнитное поле в роторе изменяется мало. Обмотки роторов делают из медного провода.
СМ делают так, чтобы магнитное поле вдоль зазора машины было синусоидальным. При этом вдоль зазора укладывается р периодов поля, где р – число пар полюсов машины (рис. 4.3).
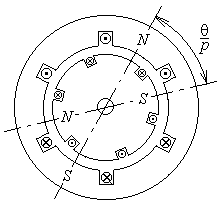 Рис. 4.2. Сдвиг между осями магнитных полей ротора и статора СМ на угол q. Рис. 4.2. Сдвиг между осями магнитных полей ротора и статора СМ на угол q. |
Принцип действия
Разноименные полюса магнитов притягиваются – это явление создает вращающий момент СД или момент сопротивления СГ. Полюса ротора притягиваются к вращающимся полюсам статора, поэтому ротор вращается с той же скоростью, что и поле статора (синхронно, отсюда и название машины).
Вращающееся магнитное поле ротора наводит в неподвижной трехфазной обмотке статора синусоидальные ЭДС, которые создают трехфазное напряжение СГ или компенсируют часть трехфазного напряжения питания СД.
ЭДС, наводимую в одной фазе статора полем ротора, мы обозначим  . Согласно закону электромагнитной индукции, пропорциональна магнитному полю ротора и частоте его вращения. В свою очередь, поле ротора пропорционально току возбуждения, поэтому:
. Согласно закону электромагнитной индукции, пропорциональна магнитному полю ротора и частоте его вращения. В свою очередь, поле ротора пропорционально току возбуждения, поэтому:
 , (4.2)
, (4.2)
где k – коэффициент, зависящий от конструкции машины, n – частота вращения,  – ток возбуждения.
– ток возбуждения.
Если момент на валу машины равен нулю, то полюса ротора располагаются точно напротив полюсов поля статора.
Если на валу действует внешний вращающий (у СГ) или внешний тормозной (у СД) момент, то полюса ротора сдвигаются относительно полюсов статора на угол  , где р – число пар полюсов СМ, q – сдвиг фаз между напряжением фазы статора
, где р – число пар полюсов СМ, q – сдвиг фаз между напряжением фазы статора  и ЭДС фазы статора
и ЭДС фазы статора  .
.
При этом получается, что у генератора ротор повернут относительно поля статора в сторону вращения (ротор как бы тащит за собой поле статора, совершая над ним работу), а у двигателя – противоположно вращению (поле статора приводит в движение ротор).
Магнитное поле ротора – это основное поле машины, оно еще называется полем возбуждения, оно создается током возбуждения обмотки ротора. Магнитное поле статора складывается из поля ротора и поля, создаваемого током обмотки статора.
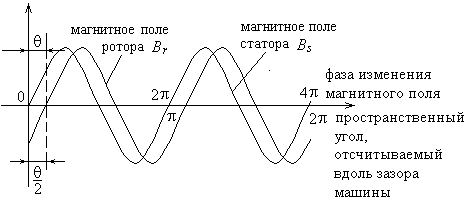 Рис. 4.3. Изменение магнитного поля вдоль зазора СМ с двумя парами полюсов. Рис. 4.3. Изменение магнитного поля вдоль зазора СМ с двумя парами полюсов. |
Рассмотрим подробнее сказанное про угол q. Все рассуждения будем вести относительно одной фазы трехфазной обмотки статора. Обозначим через  ЭДС, наводимую в фазе обмотке статора вращающимся полем статора.
ЭДС, наводимую в фазе обмотке статора вращающимся полем статора.
Если пренебречь малым активным сопротивлением фазы обмотки статора, то согласно закону электромагнитной индукции,  . Поэтому сдвиг фаз q между и – это сдвиг фаз между и . Но сдвиг фаз между и равен сдвигу фаз между волнами магнитного поля ротора и магнитного поля статора, бегущими вдоль зазора машины, потому что эти ЭДС возникают вследствие движения магнитных полей. Так как один период изменения магнитного поля вдоль зазора занимает пространственный угол
. Поэтому сдвиг фаз q между и – это сдвиг фаз между и . Но сдвиг фаз между и равен сдвигу фаз между волнами магнитного поля ротора и магнитного поля статора, бегущими вдоль зазора машины, потому что эти ЭДС возникают вследствие движения магнитных полей. Так как один период изменения магнитного поля вдоль зазора занимает пространственный угол  , то фазовому сдвигу синусоид q соответствует пространственный угол сдвига осей магнитных полей ротора и статора (рис. 4.3).
, то фазовому сдвигу синусоид q соответствует пространственный угол сдвига осей магнитных полей ротора и статора (рис. 4.3).
Последнее изменение этой страницы: 2016-06-06; Нарушение авторского права страницы
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.

При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
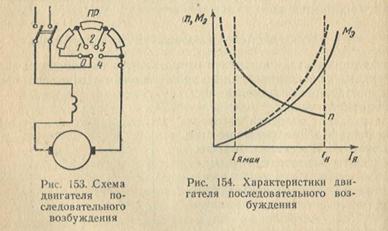
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:

Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:

т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.

§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:

где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.


Отправить ответ