
Шаговый двигатель с постоянными магнитами
Содержание:
- 1 Что такое шаговый двигатель?
- 2 Основы работы шагового двигателя
- 3 Режимы управления
- 4 Типы шаговых двигателей
- 5 Подключение обмоток
- 6 Принцип действия шаговых двигателей, разновидности
- 7 Режимы работы шаговых двигателей
- 8 Шаговые двигатели на постоянном магните
- 9 Гибридные синхронные двигатели
- 10 Вентильные шаговые двигатели
- 11 Шаговые двигатели Лавета
- 12 Параметры шаговых двигателей
- 13 Разновидности драйверов шаговых двигателей
- 14 ШАГОВЫЕ ДВИГАТЕЛИ: ПРИНЦИП РАБОТЫ И ОТЛИЧИЯ ОТ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
- 15 ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ АКТИВНОГО ТИПА
- 16 РЕАКТИВНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
- 17 Индукторные (гибридные шаговые двигатели
- 18 ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
- 19 РЕЖИМЫ РАБОТЫ СИНХРОННОГО ШАГОВОГО ДВИГАТЕЛЯ

Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
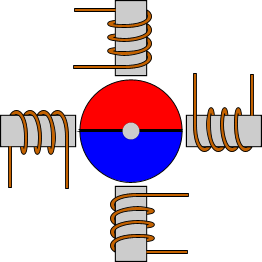
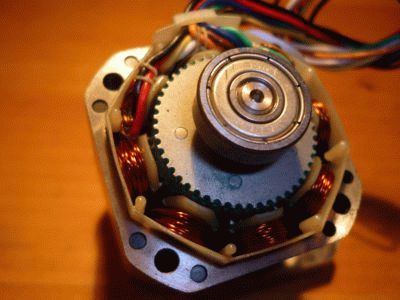
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
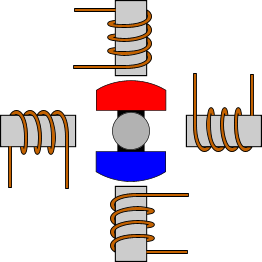
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
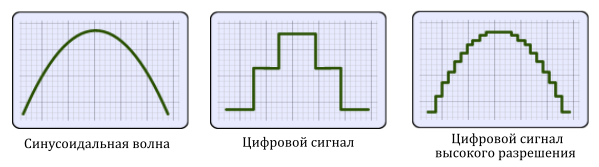
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
 Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
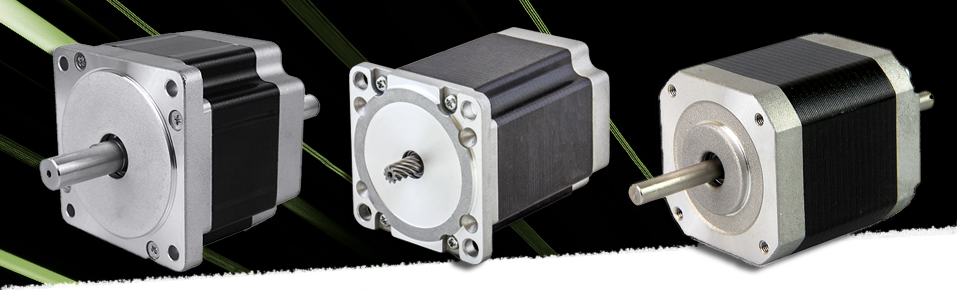
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
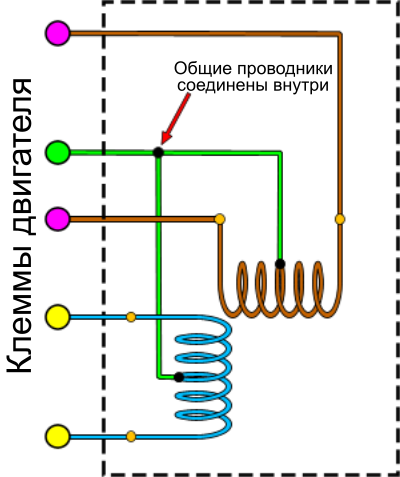
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Шаговый двигатель – электрический синхронный мотор, совершающий оборот некоторым количеством равноценных эквивалентных перемещений. От длины элементарного сегмента зависит точность, с которой ротор позиционируется нужным образом. В отдельности минимальное перемещение называется шагом.
Принцип действия шаговых двигателей, разновидности
Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Конструкция шагового двигателя
Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту.
Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века. Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы:
- Шаговые двигатели на постоянных магнитах.
- Гибридные синхронные двигатели.
- Вентильные реактивные двигатели.
- Шаговые двигатели Лавета.
Полюсы различной намотки, к примеру, унифилярной, бифилярной (см. Катушка индуктивности). В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.
Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств:
- Унифилярные:
- Красный, желтый – первая обмотка.
- Черный, оранжевый – вторая обмотка.
- Бифилярные:
- Обмотка с центральным общим выводом. Красный, черный, красный с белым – первая обмотка. Зеленый, белый, зеленый с белым – вторая обмотка.
- Двойная обмотка полюса. Красный, красный с белым – первая пара первой обмотки. Желтый, желтый с белым – вторая пара первой обмотки. Черный, черный с белым —первая пара второй обмотки. Оранжевый, оранжевый с белым – вторая пара второй обмотки.
Каждая обмотка способна образовывать несколько полюсов. Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Режимы работы шаговых двигателей
Изделия функционируют в нескольких режимах:
- Полный шаг реализуется поочередной подачей управляющих напряжений по фазам. Стандартное число – 200 перемещений на 1 оборот.
- В режиме половинного шага после активации одной фазы, остается состояние неизменным часть времени включения следующей. Получается, на зуб действуют одновременно два полюса. Вал замирает, фиксируя промежуточное положение. Потом первая фаза пропадает, ротор делает полшага вперед. Несмотря на меньший развиваемый крутящий момент, режим находит большее применение промышленностью, благодаря сокращению уровня вибраций.
Электрический синхронный мотор
Шаговые двигатели на постоянном магните
Род двигателей возможно встретить в помпе стиральной машины. К примеру, блок, удаляющий воду бака после стирки, между отдельными этапами цикла. Скорость вращения вала невелика, ротор в составе содержит постоянный магнит, шаг большой. Допустим, 45 градусов. На обмотки статора поочередно подается напряжение, создавая вращающееся магнитное поле. Постоянный магнит вала следует изменениям вектора напряженности.
Достоинствами шаговых двигателей назовем простоту, низкую стоимость. Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало. Бывает два, катушек статора — 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Благодаря низкой скорости оборотов двигатель развивает высокий крутящий момент (загружая бумагу из лотка принтера).
Двигатель с постоянным магнитом
Гибридные синхронные двигатели
Гибридные синхронные двигатели используются промышленностью по причине развития высокого крутящего момента, хорошо держат статическую нагрузку. Вал по-прежнему представлен постоянным магнитом, снабжается зубцами, на статоре множество полюсов. Тип двигателей обеспечивает высокие скорости вращения. Каждый шаг в стандартном исполнении равен 1,8 угловых градусов (200 шагов/оборот). Выпускают специализированные исполнения:
- 0,9 градуса (400 шагов/оборот).
- 3,6 градуса (100 шагов/оборот).
Вентильные шаговые двигатели
Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы. Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы.
Шаговые двигатели Лавета
Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета.

Инженер Мариус Лавет позавидует
В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом.
Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Параметры шаговых двигателей
Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения:
- Индуктивность. Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
- Потребляемый ток влияет на жесткость переключения меж соседними шагами. Более плавный режим требует снижения параметра. Большой потребляемый ток повышает крутящий момент. Таким образом, правильный выбор параметров загружает плечи проектировщика.
- Предельный уровень рабочих температур шаговых двигатель невелик. Верхняя граница находится в области 90 градусов Цельсия. Перегрев возможен на высоких крутящих моментах при значительном потреблении тока. Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
Разновидности драйверов шаговых двигателей
В глобальном смысле выделяют три группы драйверов управления шаговыми двигателями:
- Униполярные формируют импульсы тока одного направления. Простой, неприхотливый метод, использование снижает крутящий момент на 40%. Специалисты объясняют феномен невозможностью одновременного питания всех обмоток, способных участвовать в движении. Методика подходит низким рабочим скоростям.
- Драйверы с гасящими резисторами сегодня считаются устаревшими. Позволяют выжать из двигателя максимум скорости. Большое количество энергии выделяется теплом на гасящих резисторах.
- Биполярные драйверы популярны сегодня. Игнорируя сложность конструкции, достигается высокая эффективность. Каждый драйвер содержит формирующий блок, составленный четырьмя транзисторами. Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
ШАГОВЫЕ ДВИГАТЕЛИ: ПРИНЦИП РАБОТЫ
И ОТЛИЧИЯ ОТ ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система «мотор — контроллер» разрабатывается так, чтобы была возможность вывода ротора в любую фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели используются преимущественно в системах без обратных связей, требующих небольших ускорений при движении. Синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
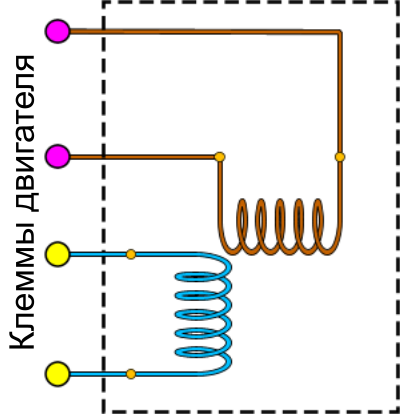
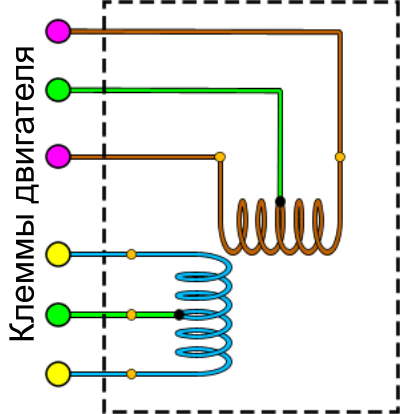
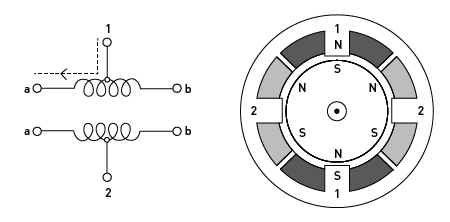
Шаговые двигатели(ШД) делятся на две разновидности: с постоянными магнитами и с переменным магнитным сопротивлением (гибридные). Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
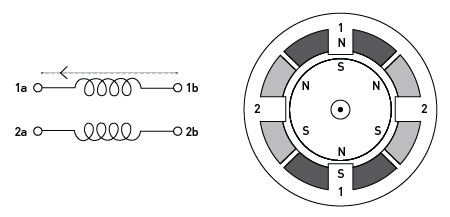
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, остановки, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных устройств.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Она позволяет независимо менять полярность напряжения на каждой обмотке.
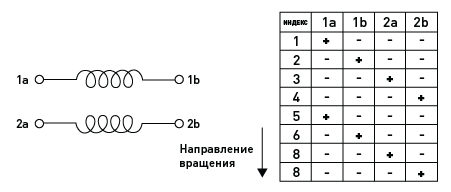
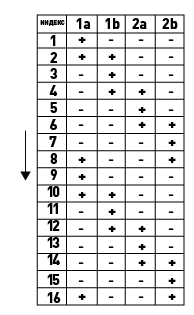
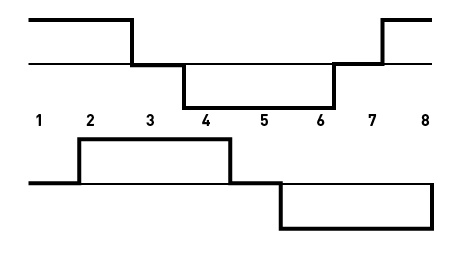
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для режима с половинным шагом.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
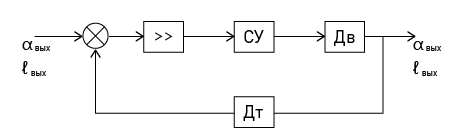
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
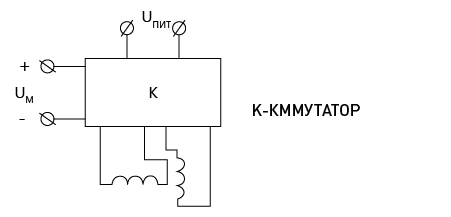
Мощность шаговых двигателей лежит в диапазоне от нескольких ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ АКТИВНОГО ТИПА
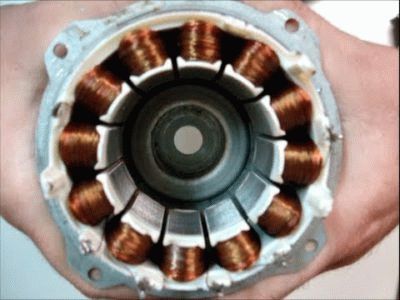
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричную и несимметричную.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
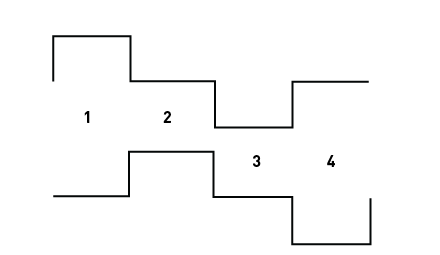
Число тактов Kt системы управления называют количеством состояний коммутатора за период его работы t. Как видно из рисунков, для симметричной системы управления Kt = 4, а для несимметричной Kt = 8.
В общем случае число тактов Kt зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
где: n1 = 1 — при симметричной системе коммутации;
n1 = 2 — при несимметричной системе коммутации;
n2 = 1 — при однополярной коммутации;
n2 = 2 — при двуполярной коммутации.
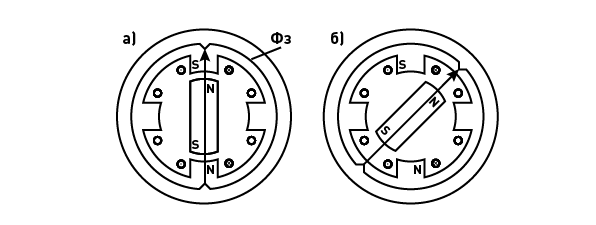
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обоих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р = 1). Реальные шаговые микродвигатели являются многополюсными (р > 1). Для примера приведем двухполюсный трехфазный шаговый двигатель.
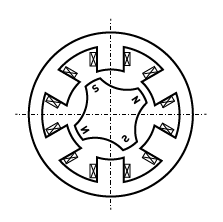
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния, поэтому р = 4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
РЕАКТИВНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
У активных шаговых двигателей есть один существенный недостаток: у них — крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Индукторные (гибридные шаговые двигатели
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
При автоматизации производственных процессов часто бывает необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
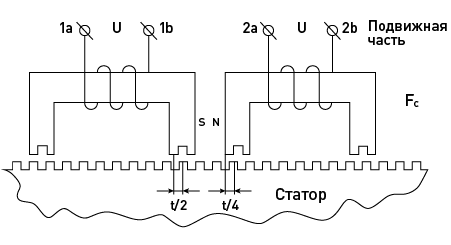
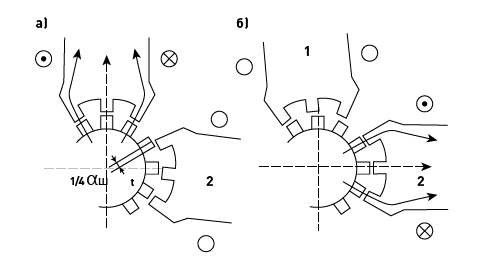
Зубцовые деления статора и подвижной части двигателя равны. В пределах одного магнитопровода ротора они сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно соответствующих параметров первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница — лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, то есть на четверть зубцового деления t/4.
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнитовоздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под него нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между ними создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечиваются минимальное сопротивление движению ротора и высокая точность позиционирования.
РЕЖИМЫ РАБОТЫ
СИНХРОННОГО ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
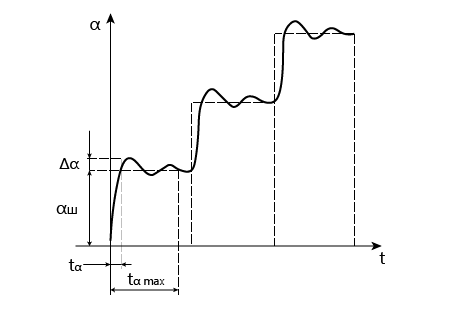
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при которой шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потоком статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
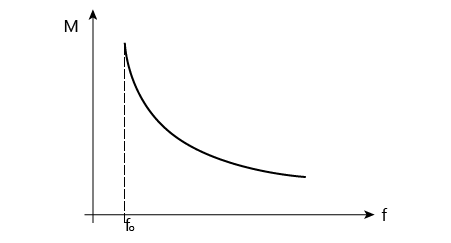
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
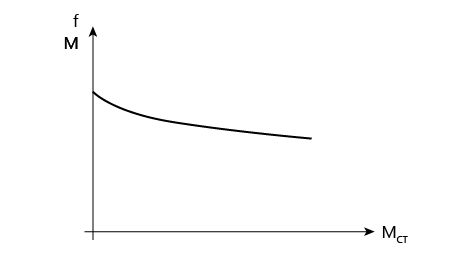
Приемистость падает с увеличением нагрузки.


Отправить ответ