
Шаговый двигатель устройство и принцип действия
Содержание:
- 1 ШАГОВЫЕ ДВИГАТЕЛИ: ПРИНЦИП РАБОТЫ И ОТЛИЧИЯ ОТ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
- 2 ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ АКТИВНОГО ТИПА
- 3 РЕАКТИВНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
- 4 Индукторные (гибридные шаговые двигатели
- 5 ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
- 6 РЕЖИМЫ РАБОТЫ СИНХРОННОГО ШАГОВОГО ДВИГАТЕЛЯ
- 7 Что это такое?
- 8 Системы управления с разомкнутой цепью (без обратной связи)
- 9 Конфигурация системы
- 10 Шаг и инкремент
- 11 Общий принцип управления
- 12 Некоторая специфика использования ШД
- 13 Борьба с нежелательными явлениями
- 14 Максимальный статический эффект
- 15 «Мертвые» положения ротора
- 16 О точности позиционирования
- 17 Высокое отношение электромагнитного момента к моменту инерции
- 18 Шаговая частота вращения и частота импульсов
- 19 Простейшая схема подключения двигателя EM-178
- 20 Реактивные двигатели
- 21 Устройства с постоянными магнитами
- 22 Гибридные установки
Принцип действия. Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемоешагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения;
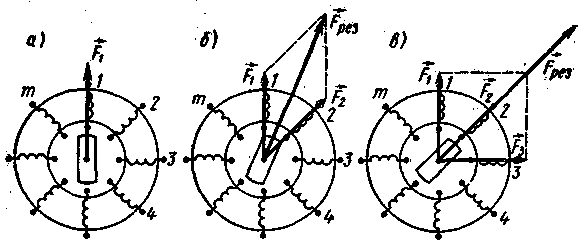 |
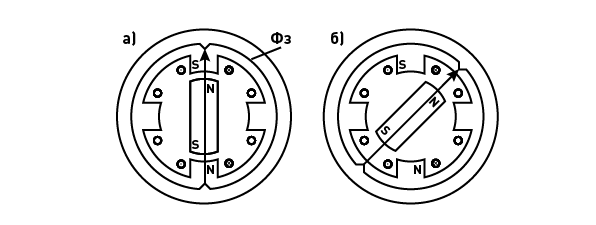
| Рис. 7.15. Схемы работы шагового двигателя при питании различных фаз обмотки якоря |
На рис. 7.15 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе. Если фазы 1, 2, 3. m обмотки якоря рассматриваемого двигателя питаются поочередно однополярными импульсами напряжения, то ротор двигателя скачкообразно перемещается в положения, при которых его ось совпадает с осями фаз 1,2, 3 и т. п. Следовательно, ротор имеетm устойчивых состояний, соответствующих направлению вектора МДС F → 1 (рис. 7.15, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Для увеличения результирующей МДС якоря, а следовательно, магнитного потока и синхронизирующего момента обычно одновременно подают питание на две, три и большее количество фаз. Так, например, если одновременно подают питание на две фазы, то положение результирующего вектора МДС F → peз и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 7.15,б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 7.15, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2mустойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т, п., называют симметричным; поочередное включение неравных групп фаз — несимметричным.
В качестве шаговых обычно применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
 |
|
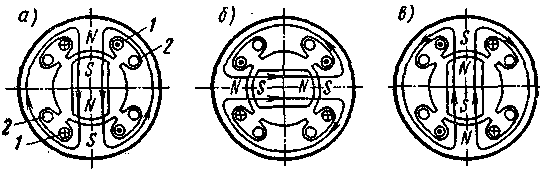
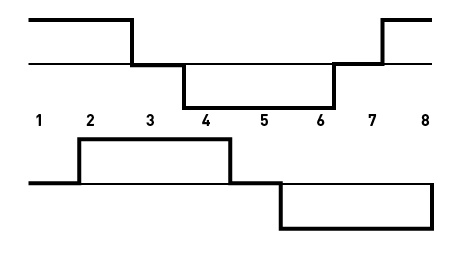
| Рис. 7.16. Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз и диаграмма изменения тока в этих фазах |  |
Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов (лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. п.).
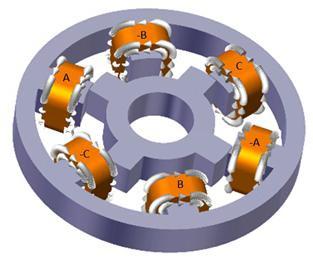
Двигатели с постоянными магнитами. Ротор двигателя (рис. 7.16) выполняют в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явно выраженные полюсы, вокруг которых в полузакрытых пазах размещаются катушки обмотки якоря (двух-, трех- или четырехфазной). В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последо-вательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 7.16, а, б, в). В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т.е. делает шаг, равный 90°. Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения. В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
1. ток в фазе 1 направлен от начала к концу; фаза 2 обесточена;
2. ток в фазе 2 направлен от начала к концу; фаза 1 обесточена;
3. ток в фазе 1 направлен от конца к началу; фаза 2 обесточена;
4. ток в фазе 2 направлен от конца к началу; фаза 1 обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки якоря представлен на рис. 7.16, г в виде временной диаграммы; изменения токов Iв1 и Iв2 в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя. Рассмотренную систему переключения фаз 1 и 2 обмотки якоря называют четырехтактной разнополярной коммутацией и сокращенно обозначают следующим образом: (+1)-(+2)-(-1)-(-2)-(+1) — . Каждым четырем тактам соответствует поворот ротора на два полюсных деления. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
где k — число тактов в одном цикле; р — число пар полюсов. При четырехтактной коммутации шаг восьмиполюсного двигателя αш = 22,5°. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0 — 500 Гц; максимальной частоте соответствует частота вращения n2 max = 2000 ÷ 3000 об/мин. В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) — . Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
Обычно шаговые двигатели имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию электронного коммутатора. При подключении к электронному коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой. Коммутацию четырехфазной обмотки обычно выполняют четырехтактной, парной: (12)-(23)-(34)-(41)-(12)- . вследствие чего обеспечивается такое же увеличение вращающего момента, что и при попарной разнополярлой коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шеститактнойразнополярной коммутации.
Реактивные двигатели. Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
 |
|
| Рис. 7.17. Положения (ротора реактивного шагового двигателя при различных полярностях включения фаз и диаграмма изменения тока в этих фазах | 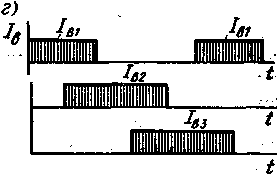 |
статора происходит в следующем порядке:. (1) — (12) — (2) — (23) — (3) — (31) — (1). т. е. коммутация является несимметричной, шеститактной, однополярной (рис. 7.17, г). При этом шаг двигателя αш = 30°. Возможна и трехтактнаякоммутация но схеме: (1) — (2) — (3) — (1) или (12) — (23) — (31) — (12). Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
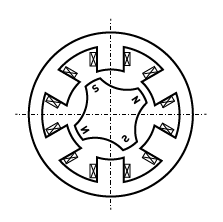
Шаг двигателя можно уменьшить, увеличив число выступов на роторе. Например, применяя шаговый двигатель с крестообразным ротором, при той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 7.17, получают шаг, равный 15°. Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е, перейдя к схеме редукторного двигателя (см. рис. 7.11).
При малом шаге (5 — 1°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
Двигатели с подмагничиванием (индукторные). По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием.
Индукторные шаговые двигатели с подмагничиванием имеют несколько лучшие характеристики, чем реактивные — больший электромагнитный момент, лучшую устойчивость и т. п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
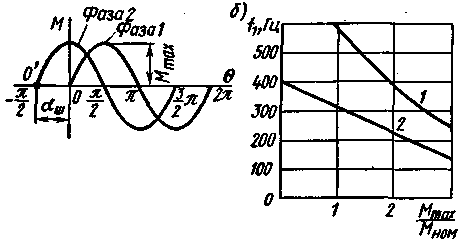 |
Рис. 7.18. Рабочие характеристики шагового двигателя |
Режимы работы шаговых двигателей. Для работы шагового двигателя характерным является регулирование частоты вра-щения в широком диапазоне путем изменения частоты подачи управляющих импульсов тока. Таким же способом осуществляют его фиксированный останов, пуск и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистационарный, установившийся и переходные.
Статический режим — это режим прохождения по обмоткам возбуждения постоянного тока, создающего неподвижное поле. При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
Квазистационарный режим — это режим отработки единичных шагов, например в приводах различных стартстопных, лентопротяжных и других подобных механизмов. Предельная частота квазистационарного режима ограничена временем затухания колебаний ротора, которые могут возникнуть при переходе ротора из одного устойчивого положения в другое (точки О и О’ на рис. 7.18, а), аналогично тому, как это происходит в обычной синхронной машине при резком изменении угла θ. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства и обгонные муфты. Предельную частоту квазистационарного режима повышают, увеличивая число фаз обмотки якоря или число тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная — при трехфазной). Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Установившийся резким — это режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме имеет постоянную частоту вращения, но при переходе из одного устойчивого состояния в другое возникают периодические и апериодические колебания относительно мгновенной точки устойчивого равновесия. При частоте управляющих импульсов f1, меньшей частоты свободных колебаний двигателя f, угловое перемещение ротора при каждом шаге, как и квазистационарном режиме, сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. Частота свободных колебаний ротора
где Mmax — максимальный электромагнитный момент при неподвижном роторе; Jp и Jн — моменты инерции ротора и нагрузки, приведенной к валу ротора. При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн /Mmax ≤ 0,3 ÷ 0,5, Jн /Jp ≤ l ÷ 2 и имелось внутреннее или внешнее; демпфирование. Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т. е. dθ/dt:
Параметр D называют коэффициентом внутреннего демпфирования. Физически внутреннее демпфирование, т. е. тормозной момент Мт в двигателях с постоянными магнитами или обмоткой возбуждения на роторе, возникает в результате взаимодействия, вращающегося потока ротора с током в обмотке якоря (см. § 7.2). У реактивных двигателей этот момент зависит от разности индуктивных сопротивлений (Хd — Xq) обмотки якоря и ее активного сопротивления Ra .При достаточно большом значении коэффициента D происходит эффективное затухание колебаний ротора двигателя. Этому способствует также наличие трения и внешних демпфирующих устройств.
Переходные режимы — основные эксплуатационные режимы шаговых двигателей, включающие в себя пуск, торможение, реверс, переход с одной частоты на другую. Основным требованием, предъявляемым к шаговым двигателям в переходных режимах, является сохранение синхронизма при изменении частоты управляющих импульсов — отсутствие потери шага.
Для каждого шагового двигателя существует некоторая предельная частота подачи управляющих импульсов fпр , при которой ротор еще следует за скачкообразно изменяющимся полем статора. Эту частоту называют частотой приемистости. Частота приемистости характеризует пусковые свойства шагового двигателя — максимальную частоту управляющих импульсов, при которой возможен пуск без выпадения из синхронизма. Она возрастает с увеличением синхронизирующего момента, уменьшением углового шага, нагрузки и момента инерции.
Для современных шаговых двигателей при номинальной нагрузке частота приемистости fпр =100 ÷ 1000 Гц. Предельная частота, при которой осуществляется торможение шагового двигателя без потери шага (с сохранением синхронизма), как правило, выше частоты приемистости: это объясняется влиянием внутреннего демпфирования, момента нагрузки и момента трения. Предельная частота реверса, при которой реализуется реверс без выпадения из синхронизма (без потери шага) составляет (0,2 ÷ 0,5)fпр . Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Рабочие характеристики шаговых двигателей. Они определяются параметрами двигателя, нагрузки (нагрузочный момент и момент инерции) и особенностями электронного коммутатора (числом тактов коммутации, формой его выходного напряжения и пр.). Основными характеристиками являются: статическая, предельная механическая и предельная динамическая характеристики приемистости.
Статическая характеристика — это зависимость электромагнитного момента М от угла θ (рис. 7.18, а), а также зависимость тока двигателя от нагрузки в квазистационарном режиме.
Предельная механическая характеристика — это зависимость частоты управляющих импульсов от максимального момента на валу ротора, при котором происходит выпадение двигателя из синхронизма (рис. 7.18,б, кривая 1). Ее снимают при плавном увеличении частотыf1.
Предельная динамическая характеристика приемистости — это зависимость частоты приемистости fпр в динамическом режиме (например, при пуске) от момента нагрузки М (рис. 7.18,б, кривая 2). Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр.
Области применения. При высоких частотах вращения (2000—3000 об/мин) применяют шаговые двигатели с постоянными магнитами на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. У этих двигателей номинальный вращающий момент Мном = 0,1 ÷ 10 Н•см, угловой шагαш = 15°. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора. Их номинальный момент Мном = 1 ÷ 25 Н•см, а угловой шаг αш = 1,5 ÷ 3°.
Не нашли то, что искали? Воспользуйтесь поиском:
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
ШАГОВЫЕ ДВИГАТЕЛИ: ПРИНЦИП РАБОТЫ
И ОТЛИЧИЯ ОТ ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система «мотор — контроллер» разрабатывается так, чтобы была возможность вывода ротора в любую фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели используются преимущественно в системах без обратных связей, требующих небольших ускорений при движении. Синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
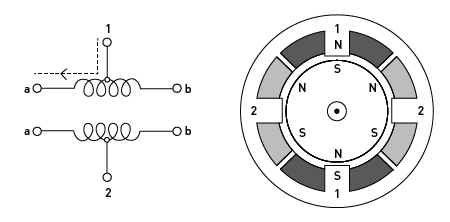
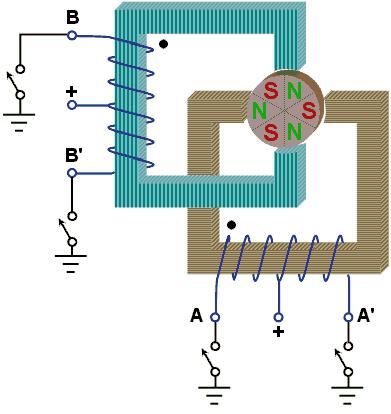
Шаговые двигатели(ШД) делятся на две разновидности: с постоянными магнитами и с переменным магнитным сопротивлением (гибридные). Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
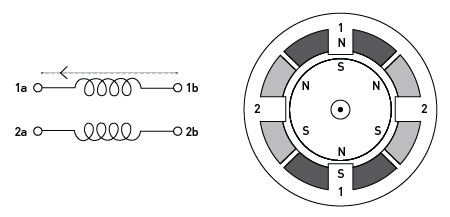
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, остановки, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных устройств.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Она позволяет независимо менять полярность напряжения на каждой обмотке.
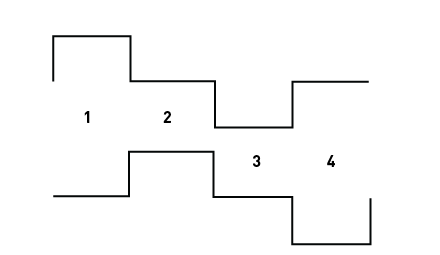
На рисунке 3 показана последовательность управления для режима с единичным шагом.
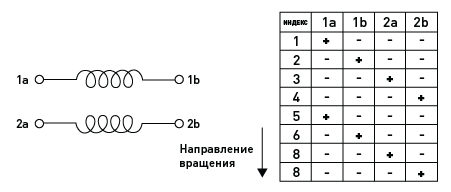
На рисунке 4 показана последовательность для режима с половинным шагом.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
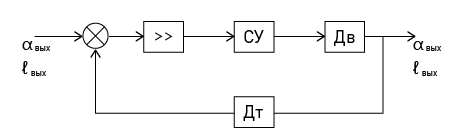
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
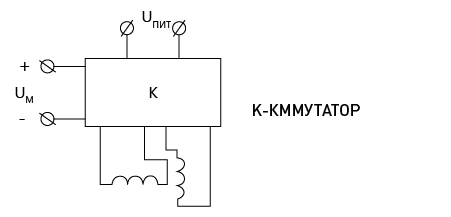
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от нескольких ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ АКТИВНОГО ТИПА
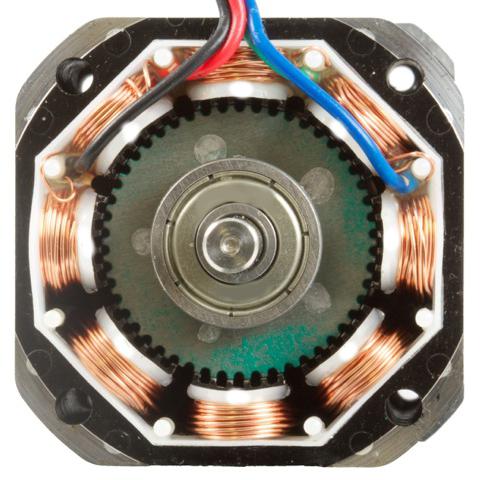
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
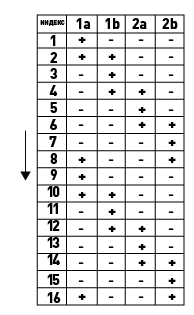
Различают два вида коммутации обмотки шагового двигателя: симметричную и несимметричную.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов Kt системы управления называют количеством состояний коммутатора за период его работы t. Как видно из рисунков, для симметричной системы управления Kt = 4, а для несимметричной Kt = 8.
В общем случае число тактов Kt зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
где: n1 = 1 — при симметричной системе коммутации;
n1 = 2 — при несимметричной системе коммутации;
n2 = 1 — при однополярной коммутации;
n2 = 2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обоих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р = 1). Реальные шаговые микродвигатели являются многополюсными (р > 1). Для примера приведем двухполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния, поэтому р = 4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
РЕАКТИВНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
У активных шаговых двигателей есть один существенный недостаток: у них — крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
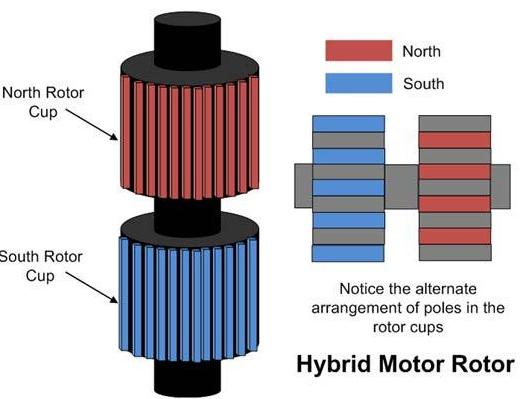
Индукторные (гибридные шаговые двигатели
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
При автоматизации производственных процессов часто бывает необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
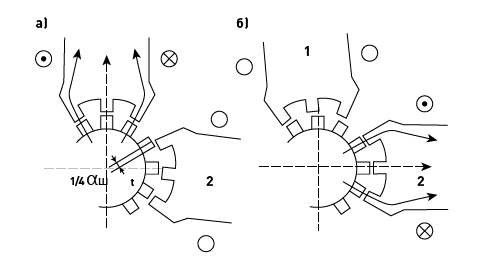
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
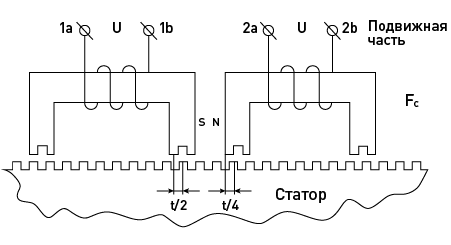
Зубцовые деления статора и подвижной части двигателя равны. В пределах одного магнитопровода ротора они сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно соответствующих параметров первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница — лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, то есть на четверть зубцового деления t/4.
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнитовоздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под него нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между ними создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечиваются минимальное сопротивление движению ротора и высокая точность позиционирования.
РЕЖИМЫ РАБОТЫ
СИНХРОННОГО ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
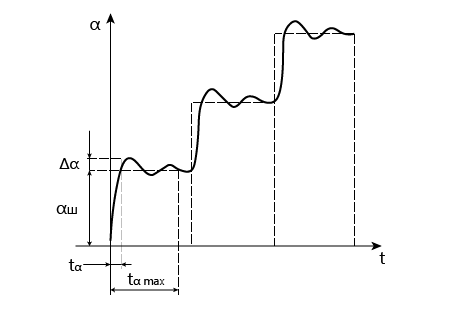
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при которой шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потоком статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
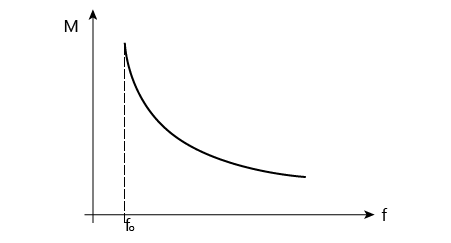
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
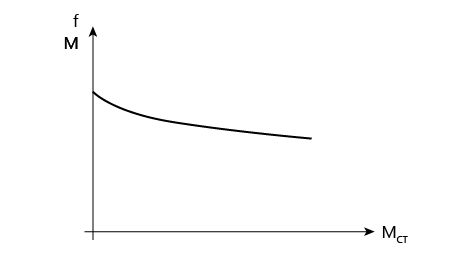
Приемистость падает с увеличением нагрузки.
В современной электротехнике используется множество самых разнообразных устройств, некоторые из них предназначаются для автоматизации технологических операций. Таковым является и шаговый двигатель. Принцип работы и устройство данного прибора описаны в статье.
Что это такое?
Системы управления с разомкнутой цепью (без обратной связи)
Чаще всего это оборудование управляется специальной электронной схемой. Питается оно только от источника переменного тока. Такие двигатели часто используются в схемах, где требуется управление частотой вращения. Это позволяет избежать необходимости использования дорогого и сложного контура обратной связи, да и защита электродвигателя становится проще (требуется только предусмотреть быстрое обесточивание).
Данный принцип работы применяют в схемах с разомкнутой связью. Следует помнить, что указанная схема (без контура обратной связи) выгодна с экономической точки зрения, но у нее есть ряд существенных ограничений.
Так, поворот ротора является достаточно нестабильным, колебательным, отчего частота вращения и прочие характеристики движения ни в коем случае не могут быть настолько же точными, каковыми они являются в двигателях постоянного тока с контуром обратной связи. Для расширения сферы применения шагового двигателя требуется изыскивать способы снижения вибрации.
Конфигурация системы
Чтобы лучше понимать устройство шагового двигателя и принцип его работы, можно рассмотреть схему функционирования прибора под его управлением, который лет 20 назад использовался для изготовления перфокарт. Для этой цели повсеместно применяли трех- и четырехфазные ШД. Сейчас мы рассмотрим схему работы первого.

Фазы обозначают порядковыми номерами 1, 2, 3 и т.д. либо буквами А, В, С и т.д. Последний вариант используется только в случае некоторых двухфазных двигателей. Таким образом, в каждый конкретный момент времени возбуждена только одна фаза из двух, трех или четырех имеющихся (в зависимости от типа двигателя). При объяснении принципов работы такого устройства это обстоятельство упоминается постоянно, но необходимо понимать, что указанная схема вовсе не является идеальным способом управления.
Шаг и инкремент
Наиболее простым вариантом является подача одиночных импульсов от управляющей схемы. В этом случае, к примеру, двигатель за один раз поворачивает ведущую звездочку конвейера на какое-то расстояние вперед. Следует заметить, что при подаче массивного механизма вперед только на один шаг еще более усугубляется проблема вибрации, да и значительная инерция дает о себе знать.
В таких случаях куда более оправданно использовать шаговый двигатель, который может за один управляющий импульс делать несколько движений. Также не помешает использовать звездочку с более мелкими зубьями. К слову, каждое такое движение называется инкрементом.
В описываемых нами случаях инкремент равен одному и нескольким шагам соответственно. После каждого цикла двигатель на какое-то время останавливается, после чего все повторяется сначала. Это называется инкрементным движением и инкрементным управлением соответственно.
Общий принцип управления
На один инкремент количество шагов больше четырех приходится в каких-то производственных линиях, конвейерах. Когда данные с запоминающего устройства (внутренняя флеш-память, жесткий диск компьютера) отправляются к контроллеру, выполняются они блок за блоком. Каждый из них содержит строго определенное количество символов (32, 48 или 64), причем в разных системах и при различных назначениях устройства эта цифра может серьезно варьироваться.
Неудивительно, что в последние годы стали распространены самоделки на основе микрокомпьютера Arduino. Шаговый двигатель в такой конструкции идеален, так как в такой связке его можно приспособить как в качестве силовой установки для игрушки, так и для довольно сложного промышленного оборудования.
Блок данных перед его использованием переносится в полупроводниковую память на контроллере, после чего движение начнется в соответствии с инструкциями, которые были записаны в первом блоке информации (перед тем как подключить электродвигатель, обязательно нужно выяснить эти характеристики).
После выполнения инструкций система начинает считывать второй массив информации. Если каждое движение состоит из множества мелких шагов, то перед основным контроллером необходимо монтировать дополнительный каскад. Чаще всего его функции выполняются входным контроллером. Он отправляет данные на второй управляющий контур с каким-то интервалом, заданным системой (Arduino). Шаговый двигатель в этом случае защищен от перегрузки запросами.
Некоторая специфика использования ШД
Мы расскажем вам о некоторых нюансах использования шаговых двигателей, а также дадим определение часто используемым в этой области терминам:
— Маленький угол шага. Как вы уже знаете, после каждого управляющего импульса ротор двигателя поворачивается на какой-то определенный градус. Чем шаг меньше, тем более высокой может быть непосредственная частота вращения. Важно знать, что шаговые двигатели вполне могут обеспечивать очень маленький шаг. Шаговым числом в этом случае называется количество оборотов за один шаг, причем это значение очень важно для инженеров. Высчитывается оно по следующей формуле:
S = 360/θS, где S – шаговое число, θ – угол шага (угол поворота).
В большинстве случаев привод шагового двигателя может выполнять 96, 128 или 132 шага за один оборот. Четырехфазные модели иногда имеют значение в 200. Редкие виды прецизионных двигателей за один только оборот могут сделать сразу 500 или 1000 шагов. Впрочем, для простых разновидностей это недостижимо, так как у них угол поворота равен 90, 45 или 15°.
Борьба с нежелательными явлениями
Зазор между роторными и статорными зубцами всегда делается минимальным для увеличения жесткости фиксации. Сама точность позиционирования зависит от характеристик только лишь инвертора, так как прочие факторы на нее влияют в гораздо меньшей степени.
А сейчас необходимо рассмотреть ряд важных характеристик и понятий, таких, как максимальный статический момент, положения «мертвого» ротора, а также точность позиционирования всех этих положений. Для определения вышеперечисленных терминов существует сразу две общепринятых распространенных концепции.
Максимальный статический эффект
Как мы уже и говорили, он имеет сразу два положения:
- Удерживающий. Это максимально допустимый эффект, который теоретически может быть приложен к валу уже возбужденного шагового двигателя без возникновения движения.
- Фиксирующий. Соответственно, это также максимальный статический эффект, который теоретически может быть приложен к валу невозбужденного двигателя без возникновения последующего вращения.
Чем удерживающий момент выше, тем ниже вероятность возникновения погрешностей позиционирования, вызываемых непрогнозируемой нагрузкой (отказали конденсаторы для электродвигателей, например). Полный фиксирующий момент возможен только в тех моделях двигателей, в которых используются постоянные магниты.
«Мертвые» положения ротора
Существует сразу три положения, в которых ротор полностью останавливается:
- Положение равновесия. В нем происходит полная остановка возбужденного шагового двигателя.
- Фиксация. Также состояние, в котором останавливается ротор. Но используется это понятие только в отношении тех двигателей, у которых в конструкции имеется постоянный магнит.
- В современных моделях шаговых двигателей, которые соответствуют всем нормам экологической и энергетической безопасности, при остановке ротора полностью обесточивается и обмотка.
О точности позиционирования
- Ошибка углового положения. Определяется как положительный или отрицательный уход от нормативного углового состояния, что очень часто наблюдается в случаях перехода ротора из одного положения в другое. Как правило, виновата инерция, а также плохая подгонка деталей.
- Точность позиционирования. Это максимальное значение ошибок углового положения ротора, которые возникают за весь период шагового движения.
Важно! Отыскать нормативные сведения для каждой категории шаговых двигателей можно как на официальной странице их производителей, так и из справочной документации, которая прилагается к такого рода изделиям. Как правило, значение ошибки находится в пределах от +0,08 до -0,03°. Проще говоря, точность позиционирования высчитывается в виде суммы двух этих показателей: 0,08° + 0,03° = 0,11°.
Таким образом, шаговый двигатель, принцип работы которого мы описываем, относится к высокоточному оборудованию.
Высокое отношение электромагнитного момента к моменту инерции
Как вы уже представляете, от шагового двигателя требуется максимально быстро начать движение сразу после поступления на контроллер управляющего импульса. Он должен столь же быстро остановиться, обладая высокой точностью позиционирования. Если во время движения последовательность импульсов управления прервется, двигатель перестанет работать в положении, определяемом последним импульсом.
Также следует иметь в виду, что отношение электромагнитного момента к моменту инерции ротора у ШД должно быть намного выше аналогичного показателя для обычных электромоторов.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина "частота вращения" в специализированной литературе нередко можно встретить определение "шаговая частота вращения". Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Кстати, а как определить требуемые конденсаторы для электродвигателей? Очень просто! Достаточно только использовать вот эту формулу:
Несложно догадаться, что под Рном понимается номинальная мощность электродвигателя в кВт.
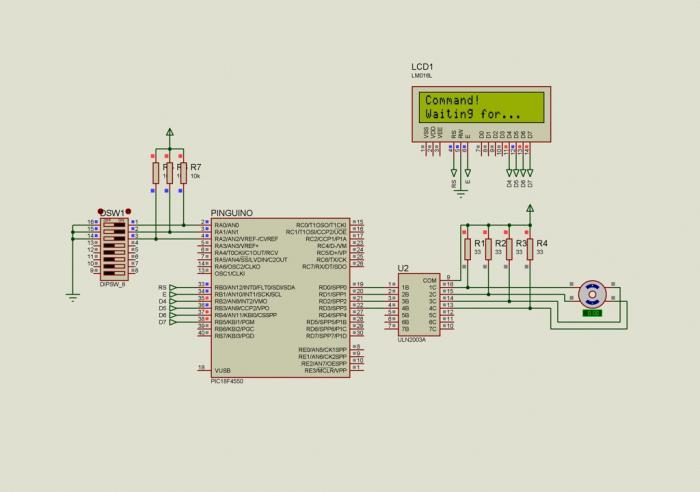
Простейшая схема подключения двигателя EM-178
А сейчас нами будет рассмотрено простейшее подключение шагового двигателя на примере модели ЕМ-178, которая повсеместно используется в промышленных принтерах.
Выполняется подключение шагового двигателя к красному контроллеру
Подключается к синему разъему
Расписать работу более масштабно попросту не получится, так как существуют миллионы самых разнообразных моделей, характеристики которых имеют существенные различия.
В настоящее время используются различные типы электродвигателей этой конструкции. В статье мы обсудим самые распространенные.
Реактивные двигатели
Именно эта разновидность приборов повсеместно используется по сей день. По сути, это почти стандартный трехфазный двигатель, на статоре которого имеется шесть зубцов. Проще говоря, каждые два зубца, противостоящие друг другу, принадлежат к одной и той же фазе. Используется последовательное или параллельное соединение их катушек.
Что касается ротора, то на нем располагается только четыре зубца. Чаще всего статор и ротор производители изготовляют из магнитомягкого материала, но нередко можно встретить просто массивные роторы из обычных металлов. Все дело в том, что к веществам, которые идут на их производство, имеется только одно важное требование: они должны обеспечивать как можно лучшую проводимость магнитного поля. Это чрезвычайно важно, если обсуждать шаговый двигатель: принцип работы напрямую связан с напряженностью магнитного поля.
Устройства с постоянными магнитами
В качестве ротора используется магнит цилиндрической формы, на статоре же есть четыре зубца с индивидуальной обмоткой. Чтобы сильнее уменьшить угол шага, в этих моделях шаговых двигателей приходится увеличивать как количество полюсов ротора, так и число зубцов на статоре. Впрочем, следует помнить о том, что оба этих параметра имеют достаточно строгие физические ограничения. В последнем абзаце нашей статьи есть информация об альтернативной их конструкции (биполярный шаговый двигатель), но такие модели можно встретить не так часто.
Как мы уже говорили, шаговые устройства с постоянными магнитами останавливаются в строго фиксированном положении даже в тех случаях, когда убрано напряжение с обмоток. В этом случае срабатывает тот самый механизм фиксации, который мы обсудили выше, – положение фиксации.
Использование постоянных магнитов оправдано с многих точек зрения, но в то же время их применение может приводить сразу к нескольким проблемам. Во-первых, их цена далека от доступной. Кстати, сколько стоит такой шаговый двигатель? Цена моделей с постоянными магнитами превышает 100 тысяч рублей.
Во-вторых, максимальная плотность магнитного поля может быть не слишком высока, так как это значение ограничено намагниченностью самого носителя. Так, сравнительно дешевые постоянные ферритовые магниты не позволяют получить более-менее достаточной напряженности поля. А какие есть еще типы электродвигателей, работающих по этому принципу?
Гибридные установки
Ротор имеет практически ту же конструкцию, что и у реактивного ШД, но вот обмотки производятся по несколько иной схеме. Дело в том, что на каждом полюсе обмотка есть только у одной катушки (трехфазные ШД). Нетрудно догадаться, что в четырехфазных моделях намотано уже две катушки. Намотка ведется по бифилярной схеме. Особенность в том, что при возбуждении на катушках создается магнитное поле разных полярностей (биполярный шаговый двигатель).


Отправить ответ