
Мальтийские и храповые механизмы
3.8.1 Общие сведения
Для осуществления прерывистых движений предназначены шаговые механизмы, в которых ведомые звенья движутся в одну сторону с периодическими остановками.
В зависимости от характера движения ведущего звена шаговые механизмы можно разделить на три группы:
– с непрерывным движением ведущего звена — мальтийские, кулачковороликовые и рычажно-шаговые механизмы (грейферные) и д.р.;
– с возвратным движением ведущего звена — храповые механизмы и фрикционно-шаговые механизмы и д.р.;
– с управляющим движением ведущего звена от управляемого электропривода .
3.8.2 Мальтийский механизм
Мальтийские механизмы применяются для преобразования обычно равномерного вращательного движения ведущего звена (кривошипа) в периодические повороты с остановками определенной продолжительности ведомого звена (креста).
По конструкции мальтийские механизмы бывают:
1) с внешним зацеплением и с внутренним;
2) плоские и пространственные (передача движения межу параллельными и пересекающимися осями);
3) с одним кривошипом и с несколькими (последние могут быть симметричные и несимметричные).
Плоский механизм с внешним зацеплением и четырехпазовым крестом показан на рис. 3.48 а. Ведущим звеном является кривошип 1, а ведомым крест 2. Число радиальных пазов z креста бывает от 3 до 12.
Рис. 3.48 Плоский механизм с внешним (а) и внутренним (б) зацеплением

Механизм с внутренним зацеплением и четырехпазовым крестом показан на рис. 3.48 б. Число пазов z креста может быть от 3 до 12.
Достоинство . Механизмы с внутренним зацеплением работают с меньшими угловыми ускорениями креста, чем механизмы с внешним зацеплением при одинаковом числе пазов креста.
На рис. 3.49 показана схема сферического мальтийского механизма.
+ сферические мальтийские механизмы позволяют передавать периодические движения между взаимно перпендикулярными валами, что удобно для компоновки привода в машине.
+ ускорения, а следовательно, и инерционные нагрузки в них меньше, чем в плоских мальтийских механизмах с внешним зацеплением.
Недостаток – изготовление сферического мальтийского креста представляет значительные технологические трудности.
Так же различают мальтийские механизмы, имеющие угол входа γ= 90°, называют механизмами с тангенциальным входом пальца в шлиц, а при γ ≠ 90° — механизмами с нетангенциальным входом.
3.8.3 Храповый механизм
Храповые механизмы используются для преобразования колебательного движения ведущего звена во вращательное или поступательное движение с остановками ведомого звена. Кроме того, они применяются как механизмы, препятствующие движению ведомых звеньев в одном направлении и допускающие свободное движение их в противоположном направлении.
По конструкции и принципу работы храповые механизмы делятся: а) на зубчатые (рис. 3.50 а, б, в); б) фрикционные с шариками или роликами (рис. 3.50 г,д);
в)фрикционные с эксцентриками (рис. 3.50 е, ж). Различают механизмы с зацеплениями:
– внешним (рис. 3.50а, г, е),
– внутренним (рис. 3.50 б, д, ж)
– торцевым (рис. 3.50 в).
Фрикционные храповые механизмы применяются при средних и больших угловых скоростях ведущего звена, так как в них за счет скольжения смягчаются толчки при включении и выключении ведомого звена.

Рис. 3.50 Виды храповых механизмов Зубчатые храповые механизмы применяются при небольших скоростях
ведущего звена, так как их включение сопровождается жесткими ударами собачки о зубья храпового колеса.
Обозначая наружный диаметр храпового колеса D и задаваясь углом φ, можно определить количество зубьев z=2π/φ , а так же шаг t=πD/z
Исходными данными для геометрического расчета храповиков являются минимальная αmin и максимальная αmax величина перемещения ведомого звена (угол поворота или перемещение), а так же передаваемый крутящий момент Mкр на валу храпового колеса.
Диаметр делительной окружности храповика D = mz. Модуль m в мм, определяют из расчета удельного линейного давления q (Н/мм) на смятие на
единицу длины зуба. Условие прочности имеет вид: 
Удельного линейного давления q прямо пропорционально силе Р и обратно пропорционально ширине зуба b
Ширину зуба определяют через коэффициент ширины колеса y = b/m в зависимости от материала храповика. Это позволяет найти модуль
Значение m необходимо округлить до ближайшего большего из стандартного ряда.
Читайте также:
- IV этап(с середины XX в. по настоящее время)– психология как наука, изучающая факты, закономерности и механизмы психики
- VIII. Виды контрактов и механизмы управления трансакциями
- Вещества, действующие на возбудимые мембраны и нарушающие механизмы ионного транспорта
- Внутренние механизмы нейтрализации финансовых рисков.
- Внутренние механизмы финансовой стабилизации
- ВОЗМОЖНЫЕ МЕХАНИЗМЫ ФОРМИРОВАНИЯ СКОПЛЕНИЙ НЕФТИ И ГАЗА
- Генетический гомеостаз. Механизмы его поддержания на молекулярно-клеточном уровне.
- Гидравлические исполнительные механизмы
- Гидростатические машины и механизмы
- Глав 2. Социальные механизмы практической реализации концепции идеологии белорусского государства и общества
- ГУМОРАЛЬНЫЕ И НЕРВНЫЕ МЕХАНИЗМЫ РЕГУЛЯЦИИ ФУНКЦИЙ
- Защитные механизмы (по Фрейду)
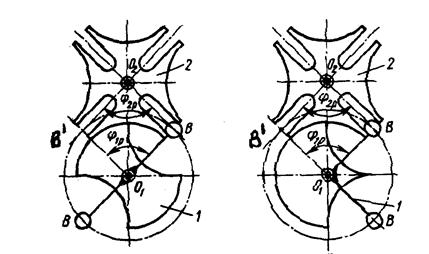
Мальтийские механизмы служат для преобразования равномерного вращательного движения ведущего звена (кривошипа) в периодические повороты с остановками ведомого звена, креста. Эти механизмы в сочетании с зубчатыми передачами используют для прерывистого движения лент, в многопозиционных устройствах – автоматах и т.д.
Различают два типа мальтийских механизмов: с внешним (рис. 17.1, а) и внутренним (рис. 17.1, б) зацеплениями. Чаще применяют механизмы внешнего зацепления.
При вращении кривошипа 1 (рис. 17.1, а) его палец (цевка) В входит в паз креста 2 и, поворачиваясь на угол j1р, поворачивает крест на рабочий угол j2р, после чего выходит из прорези. Вращение ведомого креста прекращается. Он остается неподвижным, пока кривошип не повернется на угол 2p – j1р до входа ведущей цевки в следующий паз креста.
| б |
| а |
| Рис. 17.1 |

Стопорение креста в неподвижном положении происходит с помощью секторного замка. Выпуклая цилиндрическая поверхность D диска входит в соприкосновение с вогнутой поверхностью Е креста и препятствует его повороту. Диск закреплен на кривошипе 1 в определенном положении и имеет вырез для прохода крестовин ведомого звена.
В механизме с внутренним зацеплением (рис. 17.1, б) кривошип 1 и крест 2 вращаются в одном направлении, отношение угла поворота кривошипа j¢1р к углу поворота креста j2р значительно больше, чем в механизме внешнего зацепления. Этот механизм может иметь только одну цевку. Механизмы с внутренним зацеплением являются конструктивно более сложными, но имеют меньшие габаритные размеры и меньшие угловые ускорения креста, т.е. меньшие динамические нагрузки.
Мальтийские механизмы внешнего зацепления могут иметь несколько цевок на кривошипе, что позволяет получить равные (рис. 17.2, а) и не равные (рис. 17.2, б) интервалы перемещений и остановов за один оборот ведущего звена.
Для обеспечения плавного, безударного вращения креста в начале и конце поворота направление линейной скорости пальца кривошипа в момент входа и выхода из паза должно совпадать с осью прорези. Это условие будет соблюдаться, если углы О1ВО2 и О1В¢О2 будут равны p/2.
Угол поворота креста j2р = 2p/z2, где z2– число пазов креста.
Рассматривая четырехугольник О1ВО2В¢ (рис. 17.1, 17.2), получим
j1р = p 7 j2р или j1р= p  (17.1)
(17.1)
(здесь и далее верхний знак (–) – для внешнего зацепления, нижний (+) – для внутреннего).
| б |
| Рис. 17.2. |
| а |
Для мальтийского механизма с одной цевкой цикл соответствует одному обороту кривошипа. Время цикла tц состоит из времени поворота t2р креста и времени его покоя t2п. Отношение t2p/tц называют коэффициентом времени движения
kд = t2p/tц = j1р/2p = (z2  2)/(2 z2). (17.2)
2)/(2 z2). (17.2)
При kд = 1 крест вращается непрерывно, без остановок.
Из (17.2) следует, что при одной цевке (z1 = 1) коэффициент kд зависит только от числа пазов z2 креста. Анализируя зависимость (17.2) отметим, что прерывистое движение возможно, т.е. kд > 0 при числе пазов z2 ≥ 3. В механизме с внешним зацеплением при z2 = 2 коэффициент времени движения kд = 0. Наименьшее значение коэффициента kд при z2 = 3 равно 1/6.
При числе цевок z1 > 1 (внешнее зацепление) время цикла tц¢ = 2p/(w1z1) и коэффициент времени движения
и максимальный радиус креста
| б |
| а |

Ведомое звено (см. рис. 17.1, а) мальтийского механизма вращается с переменной скоростью. Скорость креста равна нулю в начале и конце поворота. Максимальную скорость w2max ведомое звено имеет при прохождении цевки через линию центров О1О2. Из равенства линейных скоростей в точке касания цевкой креста имеем
где r2min = а – r1 = a[1 – sin(p/z2)] – расстояние от оси вращения креста, т.е. точки О2 до цевки. Из выражения (17.7) имеем
 . (17.8)
. (17.8)
В этом положении угловое ускорение креста e2 равно 0, а в начальный и конечный моменты его движения e2 нач = w1 2 tg(p/z2); e2 кон = –w1 2 tg(p/z2).
Механизмы с мальтийским крестом работают плавно, без ударов в начале и конце поворота ведомого звена.
Ширину dп и длину ℓ пазов креста находим по формулам
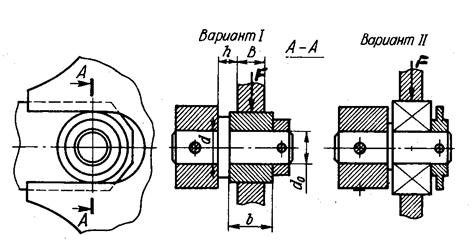
Для обеспечения низкого коэффициента трения между пальцем кривошипа (цевкой) и рабочими поверхностями креста и высокой износоустойчивости этих элементов в качестве пальца применяют ролик или стандартный подшипник качения (рис. 17.4). Трение скольжения пальца о рабочие поверхности креста заменяется при этом трением качения. Обычный материал креста – сталь 40Х, пальца – ШХ15. Диаметр оси ролика пальца кривошипа d принимают (0,5 … 0,6)dп. Для уменьшения трения в зацеплении рабочие поверхности пазов и цевки обильно смазывают.
Дата добавления: 2014-11-29 ; Просмотров: 2648 ; Нарушение авторских прав? ;
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Кривошипные и кулачковые механизмы работают с периодическим изменением направления и скорости движения ведомого звена. При этом начальное и конечное положения этого звена повторяются периодически, не меняясь. Ведомое звено движется непрерывно, за исключением участка кулачка (кулачкового механизма), соответствующего выдержке (когда рабочий орган неподвижен).
В ряде случаев необходимо периодически перемещать в одном направлении ведомое звено, например, подавать инструмент на глубину резания в строгальных станках, поворачивать револьверную головку. Движение при этом происходит кратковременно, толчком. Для этого служат храповые и мальтийские механизмы.
Храповые механизмы могут быть с наружным и внутренним зацеплением. Вмеханизме с наружным зацеплением (рис. 3.27, а) собачке 3 сообщается качательное движение. При движении против часовой стрелки собачка через зубья храпового колеса 2 поворачивает его на некоторый угол. При обратном ходе собачка, проскальзывая по зубьям храпового колеса, не вращает его. Качательное движение собачка 3 получает через шатун от ведущего кривошипного диска 6 с пальцем 5. Изменение положения пальца 5 в пазу (т.е. изменение радиуса R) позволяет регулировать угол поворота a собачки 3. Другим способом изменять угол поворота храпового колеса при неизменном положении кривошипного пальца 5 можно щитком 4, который закрывает часть зубьев храпового колеса, и собачка в начальный период рабочего движения скользит по его поверхности, а затем сходит с него, попадая на зуб храпового колеса, и поворачивает его. Щиток в выбранном положении удерживает фиксатор 1.
В храповом механизме с внутренним зацеплением (см. рис. 3.27, б) вал с жестко посаженным на нём диском, к которому прикреплена собачка 3, имеет качательное движение, и собачка, вращаясь по часовой стрелке, поворачивает храповое колесо 2. Когда собачка движется в обратном направлении, храповое колесо неподвижно.
Мальтийские механизмы применяют для того, чтобы периодически поворачивать на определённый угол 2b ведомое звено — многопазовый диск ("мальтийский крест") 1 (рис. 3.28) при равномерном повороте ведущего звена — кривошипного диска 3. За часть оборота кривошипного диска 3 (угол 2a), когда происходит поворот диска 1, кривошипный палец (цевка) 2 вводится в радиальный паз и выводится из него. В момент вывода пальца из одного паза следующий паз оказывается в положении, при котором палец может быть снова введён в него. Для смягчения удара палец должен входить в паз в строго радиальном направлении. На угол 2g кривошип поворачивается вхолостую. Если у кривошипного диска 3 два пальца, то за один его оборот многопазовый диск 1 поворачивается дважды, каждый раз на угол 2b.


| Рисунок 3.27 — Храповые механизмы |
Не нашли то, что искали? Воспользуйтесь поиском:


Отправить ответ