
Схема регулятора скорости бесколлекторного двигателя
Содержание:

Стабилизирующий подвес для камеры своими руками. Часть 1.
Ниже речь пойдёт про управление низкооборотными трёхфазными бесколлекторными моторами в статичном режиме с использованием трёхфазного моста L6234.
Но сначала немного теории.
Что такое бесколлекторные моторы?
Как следует из названия, эти моторы у которых отсутствует щёточно-коллекторный узел. На вращающейся части – роторе – расположены постоянные магниты. На неподвижной части – статоре – обмотки электромагнитов. В движение такой мотор приводится изменением тока на разных фазах. Одним из примеров таких моторов являются шаговые двигатели. Изменение электрических фаз приводит к смещению ротора на строго предопределённый угол – один шаг.
Также есть моторы, рассчитанные на постоянное вращение. Например, двухфазные бесколлекторные моторы используются в компьютерных вентиляторах. Трёхфазные моторы используются в моделировании, а также в приводе электрических велосипедов и скутеров.
Отсутствие скользящих контактов щёток позволяет достигать большой мощности и долговечности.
Рассмотрим типичный трёхфазный мотор, используемый в авиамоделировании.
Если ротор с магнитами расположен внутри кольца, образованного электромагнитными катушками, то такой мотор называют inrunner, такие моторы чаще используются в автомоделизме. В авиамоделизме популярна обратная компоновка: корпус ротора с кольцом магнитов вращается вокруг статора с электромагнитами (см. рисунок).

Эти моторы также подразделяются по количеству электромагнитов и количеству полюсов. Наиболее распространённая компоновка 12N14P что означает наличие 12 обмоток статора и 14 магнитных полюсов на роторе. Число полюсов всегда кратно 2: ведь полюса бывают только двух типов – северный и южный. Число обмоток кратно трём, поскольку двигатель трёхфазный. На схеме показана намотка обмоток. A B C – намотка соответствующей обмотки в одну сторону, -a -b -c – в противоположную.
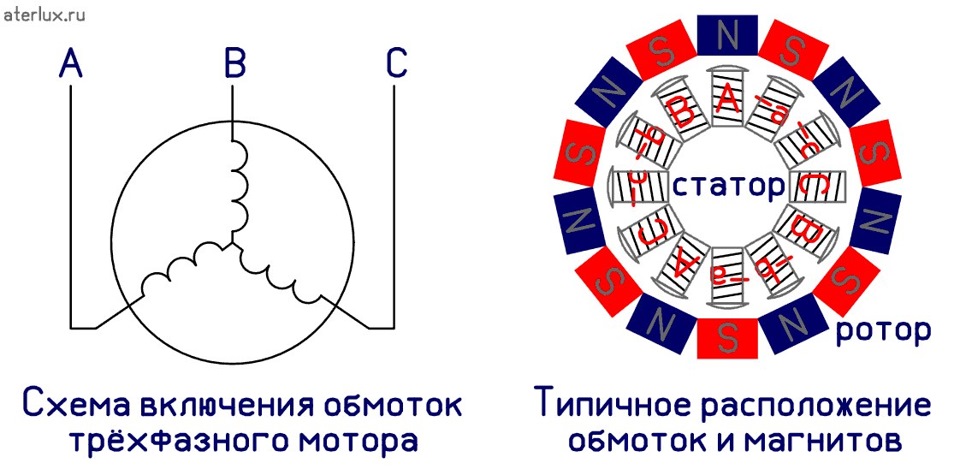
В большинстве случаев обмотки соединяются «звездой», как показано на схеме. Подавая попарно на выходы напряжение той или иной полярности, контроллер мотора пробегает полный электрический цикл, состоящий из 6 смен полярностей. За этот цикл ротор проворачивается на два магнитных полюса. То есть, в нашем случае, чтобы мотор совершил один оборот, электрические фазы должны пройти 7 полных циклов.
Для электрической коммутации используются трёхфазные мосты, представляющие из себя три блока (полумоста), в каждом из которых по два транзистора – на плюс и на минус. Для управления мотором на одном из трёх полумостов выбирается «плюс», на другом «минус», а третий остаётся отключенным. При помощи ШИМ, транзисторы импульсами коммутируют фазу двигателя к выбранной полярности, пока он не провернётся на нужный угол. Затем схема коммутации меняется. Микроконтроллер в плате управления двигателем определяет моменты, когда фазы должны быть переключены. Для этого используются либо установленные на моторе датчики Холла, либо же ЭДС, возникающая в проводе свободной фазы.
Для управления маломощными моторами годится трёхфазный мост L6234.
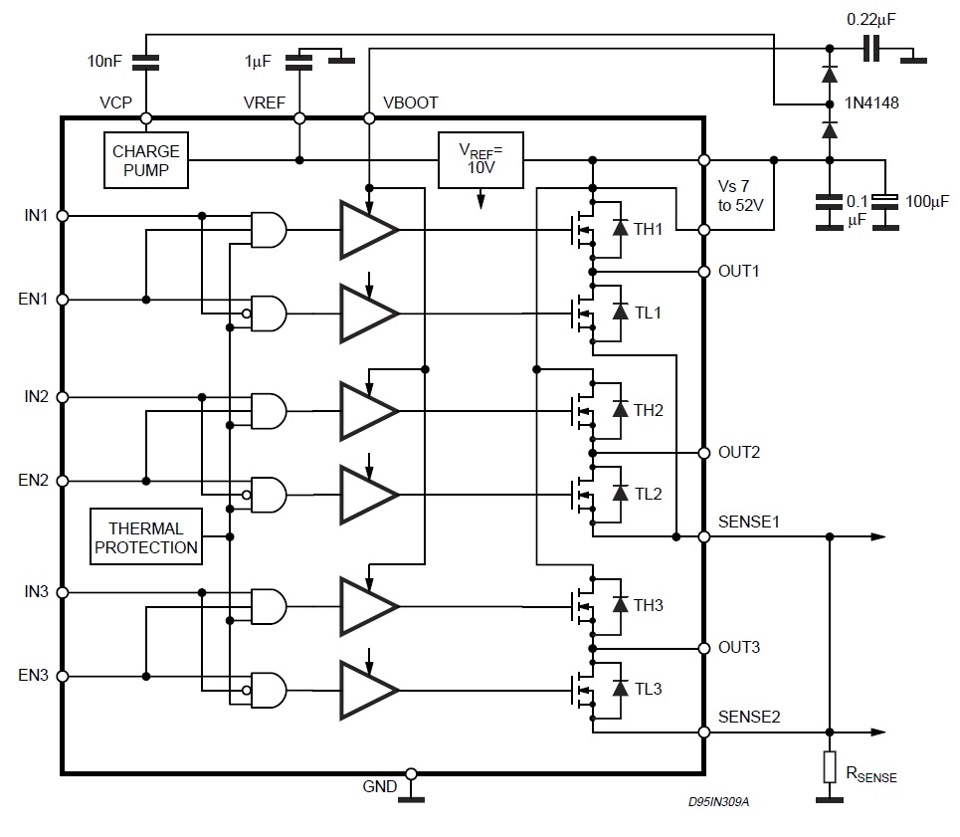
L6234 представляет собой сборку в одном корпусе трёх полумостов, на двух n-МОП транзисторах каждый, драйверов к ним и схемы подкачки напряжения для верхнего ключа. Каждый полумост управляется значениями на двух входах: один из них выбирает полярность (коммутировать плюс, или минус), а второй включает, или отключает полумост. Для управления высокоскоростными моторами вход включения можно использовать для контроля мощности при помощи ШИМ.
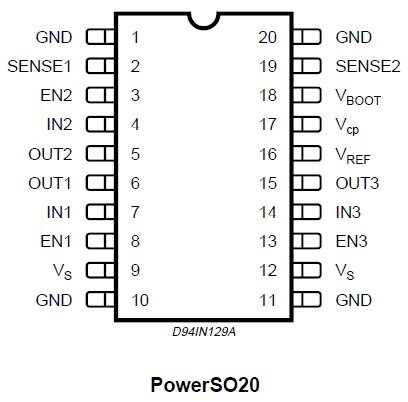
Максимальный ток, на который рассчитана микросхема — 4 Ампера.
Обмотки высокооборотистых моторов наматываются пучком толстой проволки, небольшим числом витков, порядка 10-20. Они обладают очень маленьким сопротивлением постоянному току, сила тока достигает десятков Ампер, и если мотор не вращается, обмотка может перегретсья и перегореть.
Но существует разновидность таких моторов, которые предназначены для работы в статичном положении. Их обмотки наматываются большим числом витков (порядка 100) тонкой проволкой. Подавая различные значения напряжений на входы, можно создать в его обмотках магнитное поле нужной полярности, и тем самым зафиксировать его в нужном положении.

Такие моторы представляют собой промежуточное звено между шаговыми двигателями и высокоскоростными моторами: они позволяют статично фиксировать произвольное положение, но не ограничены определёнными «шагами». Используются, в основном, в стабилизирующих подвесах для видеокамер в аэровидеосъёмке. По-английски такие подвесы называются gimbal (=универсальный шарнир), а моторы так и называют gimbal motor.
Для управления можно использовать тот же самый трёхфазный мост L6234. На входы включения (ENx) подаётся постоянный высокий уровень, то есть все три полумоста постоянно включены. А вот входы выбора полярности (INx) подключаются к ШИМ-выходам микроконтроллера. В микроконтроллерах типа ATmega48/88/168/328 и т.п. можно настроить 6 ШИМ-выходов, а значит, управлять сразу двумя такими моторами.
Очень важно, чтобы все ШИМ выходы работали синфазно. То есть, если каждый ШИМ настроен на одно и то же значение, то переключаться они должны строго одновременно. L6234 позволяет коммутировать на частоте до 50кГц, поэтому, для плавной бесшумной работы, можно смело настраивать ШИМ выходы МК на максимальную частоту. При частоте МК 8 МГц и phase-correct режиме выхода, частота ШИМ составит 15 686 Гц.
Для синхронизации таймеров в ATmega48/88/168/328 можно воспользоваться регистром GTCCR, который остановит счёт таймера. Ниже пример настраивающий все 6 ШИМ выходов синфазно. Timer1 при этом работает в 8-битном режиме:
GTCCR = (1 « TSM) | (1 « PSRASY) | (1 « PSRSYNC); // Блокировка счёта
OCR0A = 0;
OCR0B = 0;
OCR1A = 0;
OCR1B = 0;
OCR2A = 0;
OCR2B = 0;
TCCR0A = 0b10100001;
TCCR0B = 0b00000001;
TCNT0 = 0;
TCCR1A = 0b10100001;
TCCR1B = 0b00000001;
TCNT1 = 0;
TCCR2A = 0b10100001;
TCCR2B = 0b00000001;
TCNT2 = 0;
(1 « TSM); // Разблокировка и одновременный запуск таймеров
Если на все 3 ШИМ выхода, управляющие одним мотором, подаётся одно и то же значение, то, хотя полярность каждого моста быстро меняется почти 16 тысяч раз в секунду, поскольку это происходит одновременно, ток через обмотки не идёт. Но если значение ШИМ хоть одного вывода отличается от остальных, то появляется небольшой промежуток времени, когда разные фазы коммутируются с разной полярностью, и через обмотки идёт ток. Чем больше разница значений ШИМ, тем большую часть времени ток будет идти.
Для того, чтобы зафиксировать мотор в нужном положении, значения ШИМ должны быть пропорциональны синусу, со смещением на треть периода (т.е. на 2/3*Pi).
Иначе говоря, значение ШИМ для i-й (от 0 до 2) фазы мотора можно вычислить по формуле:
PWM(i) = 128 + sin(A+ i * 2 / 3 * Pi) * P
Где P – выдаваемая мощность (до 127), A – электрический угол. Изменяя A можно добиться поворота мотора на определённый угол. Напомню, что изменение электрического угла на полный цикл, приводит к повороту мотора на два магнитных полюса. В схеме с 14 магнитами для целого оборота потребуется 7 циклов смены электрического угла
Если вещественную арифметику заменить на целочисленную, а значения синуса хранить в таблице, то скорости МК вполне хватит на управление такими моторами.

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно "отрезается" кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.

Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
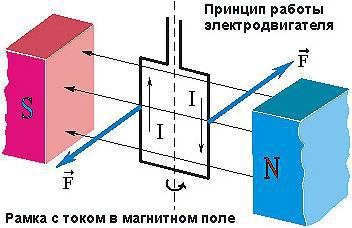
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
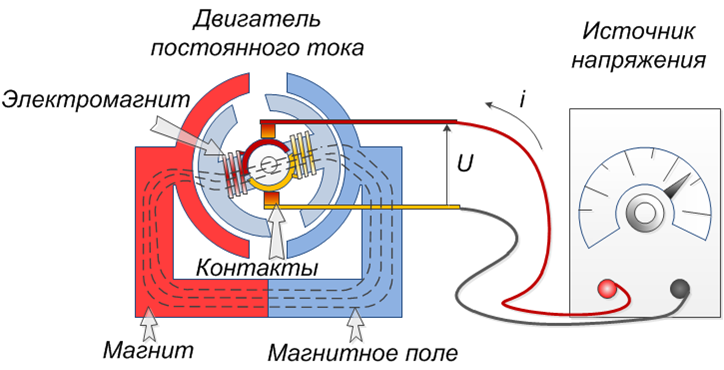
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от "порций" коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
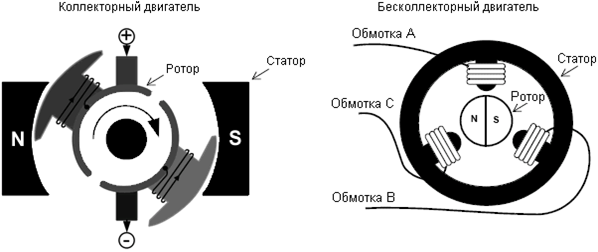
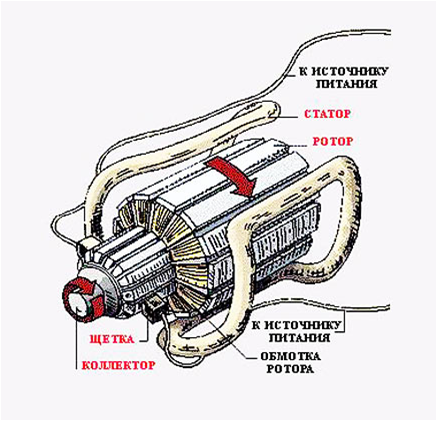
Устройство бесколлекторного двигателя:
Inrunner (произносится как "инраннер"). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как "аутраннер"). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами. 
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.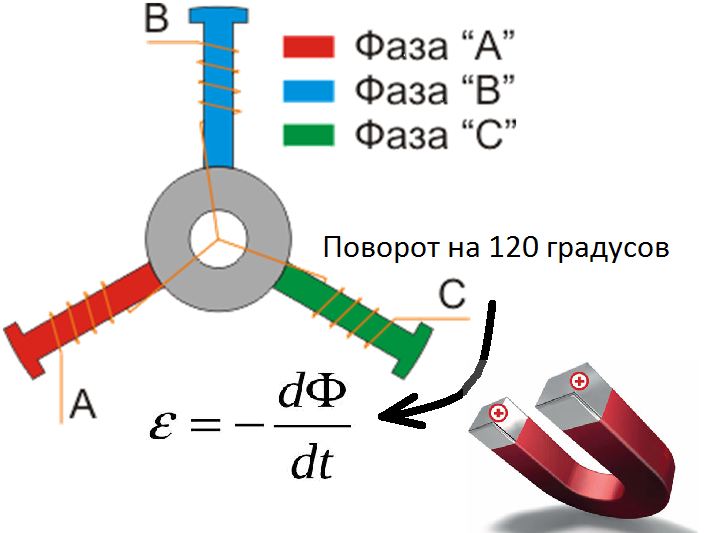
Что бы измерить это напряжение изпользуется метод "виртуальной точки". Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально "переложить провод" в место соединения всех обмоток: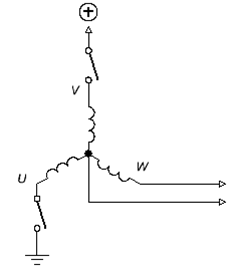
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):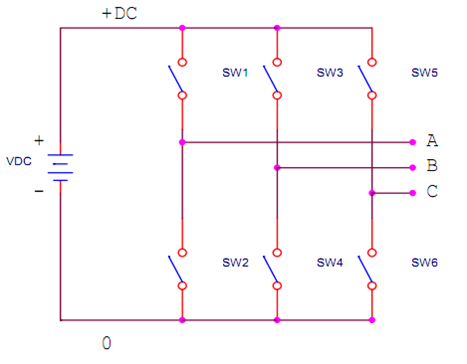
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).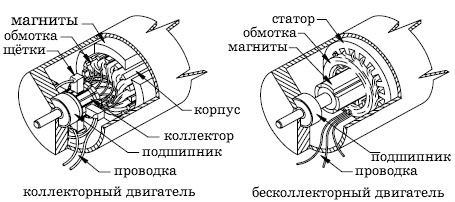
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм 
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение. 
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 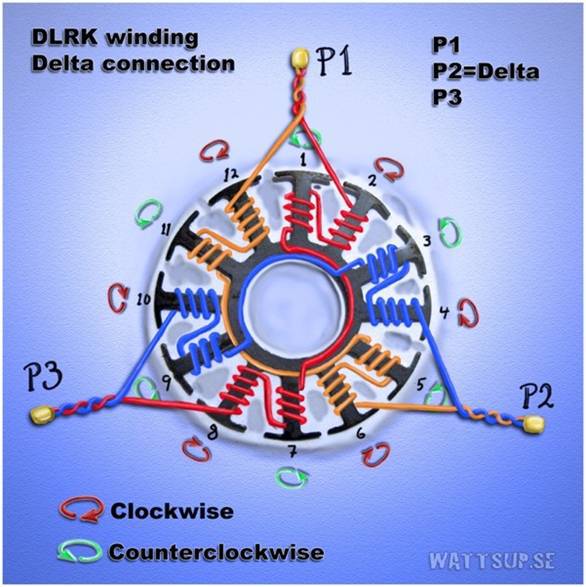
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.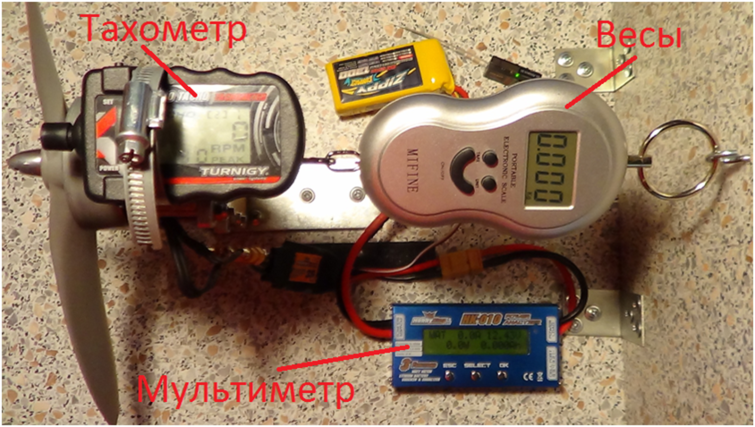
Чтобы увидеть отличия соединений "звезда" и "треугольник" я соединял по разному обмотки: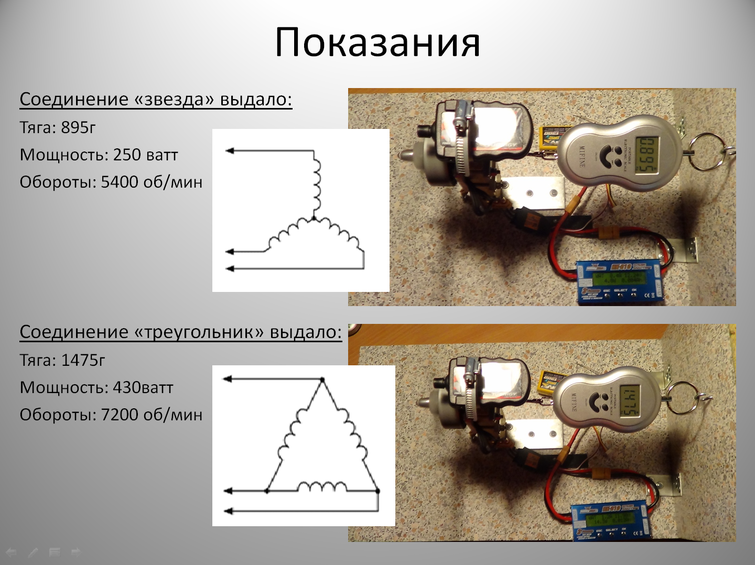
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. 
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете. Мягкой посадки 😀
Расчет КПД двигателя: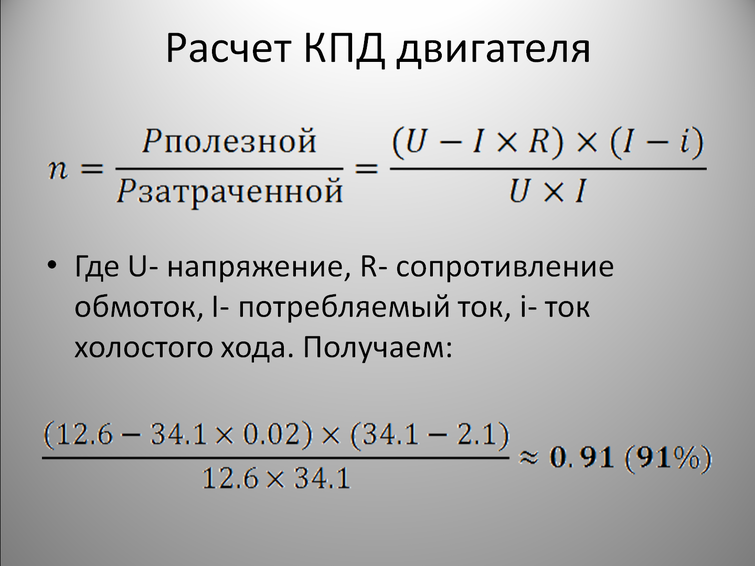
Очень хороший показатель. Хотя можно было еще выше добиться. 
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)


Отправить ответ